运动控制—气动冲床 课程设计说明书 学院:机械工程与自动化 班级: 测控0 8 1 姓名: 吴哲伦 学号: 0 8 0 2 3 8 1 0 2 2 运动控制课程设计 基于单片机的气动冲床运动控制 设计目的: 通过对本设计,是学生熟悉运动控制系统的组成与搭建以及如何通过软件编程控制实际运动机构完成预定的动作,同时掌握气动控制及相关电路的设计,完成整个控制系统软硬件的设计
设计概述: 本次设计主要完成了以下三部分: 1
软仿运动系统 2
系统硬件电路设计 3
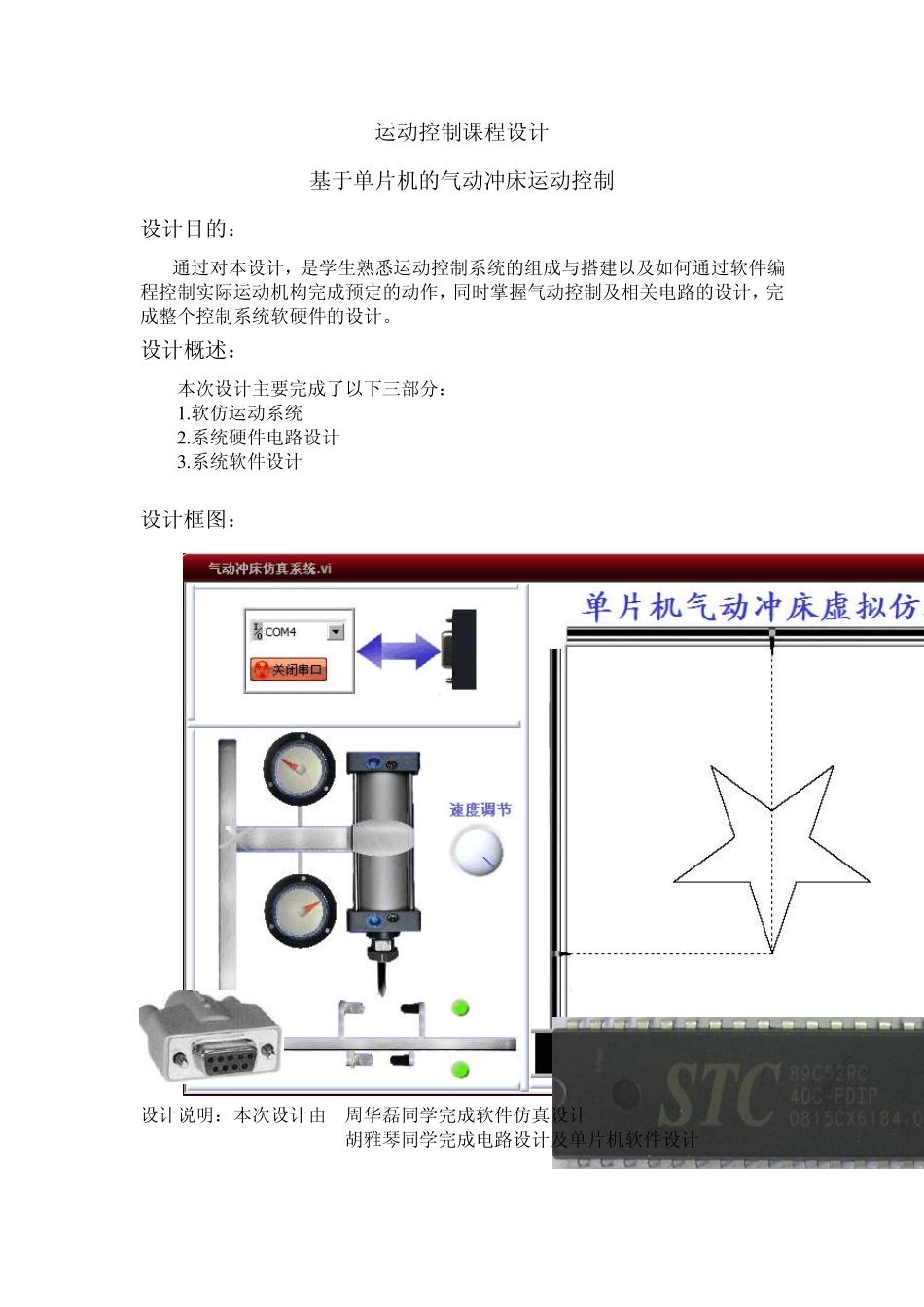
系统软件设计 设计框图: 设计说明:本次设计由 周华磊同学完成软件仿真设计 胡雅琴同学完成电路设计及单片机软件设计 软仿运动系统: 在整个运动控制系统中,由于实际运动机构缺乏,本设计采用软件模拟方式进行运动机构的运动仿真,如下图: 仿真系统对以下部件进行了模拟仿真: 1
X Y 方向步进电机的运动,整个坐标系大小为(0,0)到(458,364) 2
冲头运动仿真以及冲头位置检测,仿真软件会在冲头执行完下冲并还原的动作 后,即上面的光电对管有信号后会向下位机发信号,通知冲头动作已经完成 3
冲点与非冲点仿真,在冲点,冲头会有冲的动作,同时当前坐标点变黑,表示 为冲点 下位机控制: 下位机对仿真软件中运动机构的控制是通过串口相互发指令完成的,指令如下: Muc 通过控制指令可以方便的实现插补 图像运控
缺点及解决: 1
由于此种控制需要串口发送大量数据,所以会出现数据丢失的情况,解决方法就是在进行 XY 电机控制的时候,在相邻指令之间加上一定的延时,能够比较有效的解决此问题
由上图可以看出,单片机对冲头的控制过程是一个反馈过程,如果系统在发指令过程中,某一方发生指令丢失,整个系统将会停止,即其中一方收不到指令或另一方收不到反馈而系统停止运转,解决方法就是在单片机控制方面,采用超时重发送机制,在等待反馈的时候,打