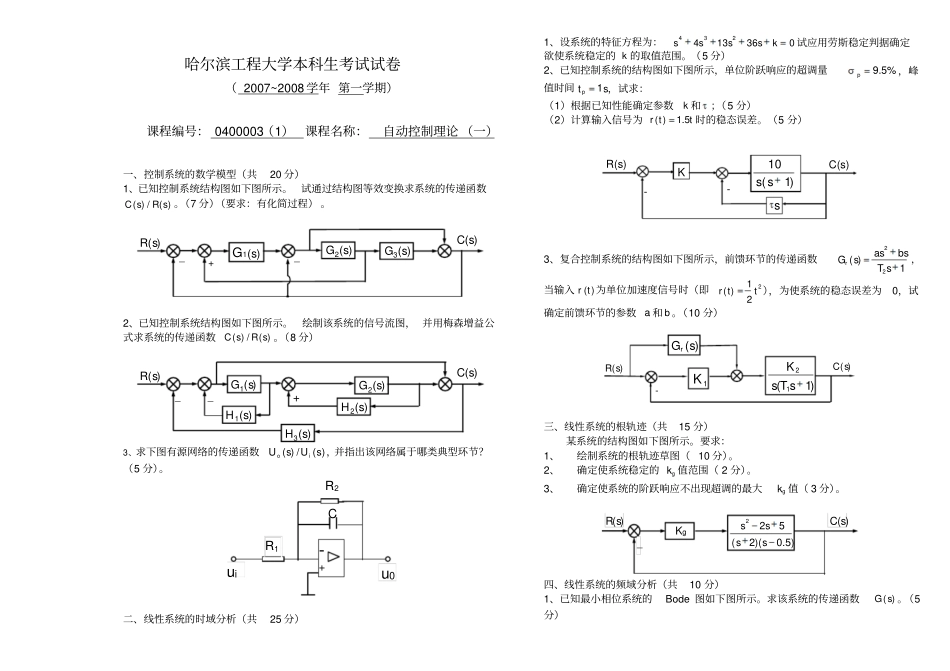
一、控制系统的数学模型(共20 分)1、已知控制系统结构图如下图所示
试通过结构图等效变换求系统的传递函数( ) /( )C sR s
(7 分)(要求:有化简过程)
R(s)C(s)G1(s)G2(s)G3(s)_+_2、已知控制系统结构图如下图所示
绘制该系统的信号流图, 并用梅森增益公式求系统的传递函数( ) /( )C sR s
(8 分)R(s)C(s)G1(s)G2(s)H1(s)_H2(s)_+H3(s)3、求下图有源网络的传递函数( ) /( )oiUsUs ,并指出该网络属于哪类典型环节
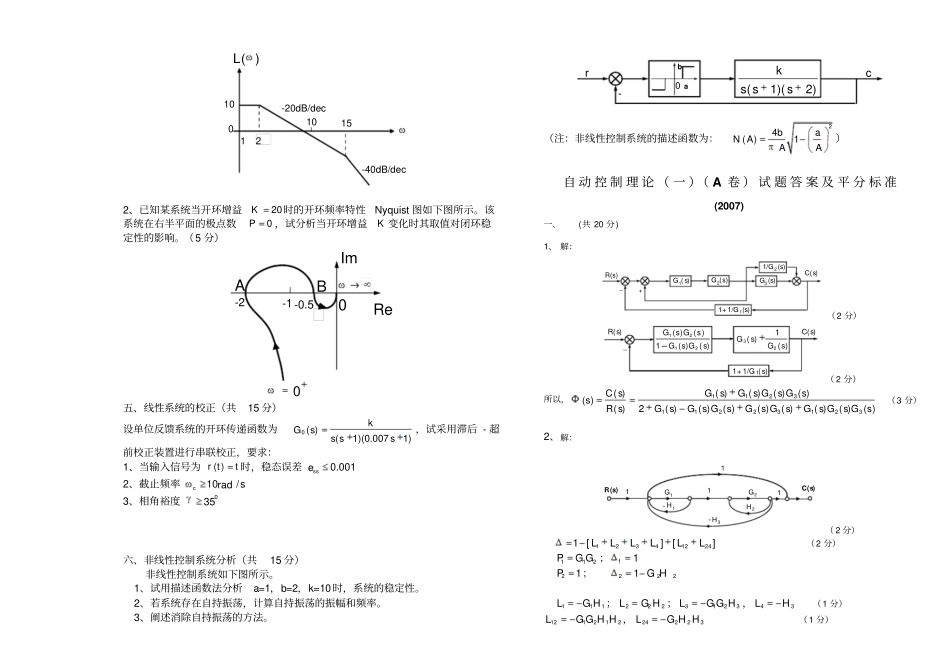
- + uiu0R1R2C二、线性系统的时域分析(共25 分)1、设系统的特征方程为:432413360ssssk试应用劳斯稳定判据确定欲使系统稳定的 k 的取值范围
(5 分)2、已知控制系统的结构图如下图所示,单位阶跃响应的超调量9
5%p,峰值时间1pts,试求:(1)根据已知性能确定参数k 和;(5 分)(2)计算输入信号为( )1
5r tt 时的稳态误差
(5 分))1(10ss- - R(s) C(s) sK3、复合控制系统的结构图如下图所示,前馈环节的传递函数22( )1rasbsG sT s,当输入( )r t 为单位加速度信号时(即21( )2r tt ),为使系统的稳态误差为0,试确定前馈环节的参数 a 和 b
(10 分)-R(s)1K)1(12sTsKC(s))(sGr三、线性系统的根轨迹(共15 分)某系统的结构图如下图所示
要求:1、绘制系统的根轨迹草图( 10 分)
2、确定使系统稳定的gk 值范围( 2 分)
3、确定使系统的阶跃响应不出现超调的最大gk 值( 3 分)
R(s)C(s)Kg_225(2)(0
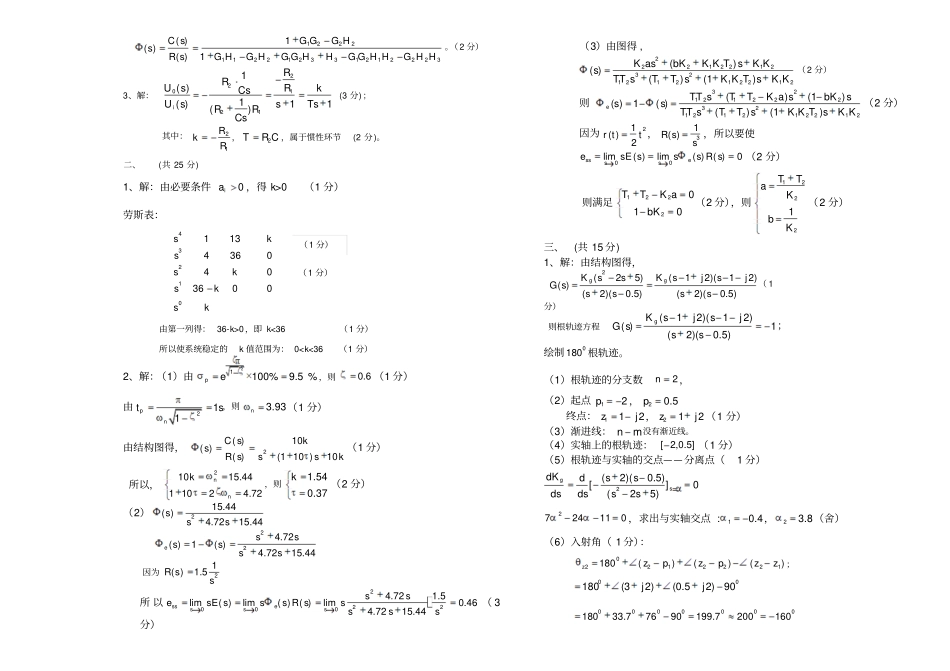
5)ssss四、线性系统的频域分析(共10 分)1、已知最小相位系统的Bode 图如下图所示
求该系统的传递函