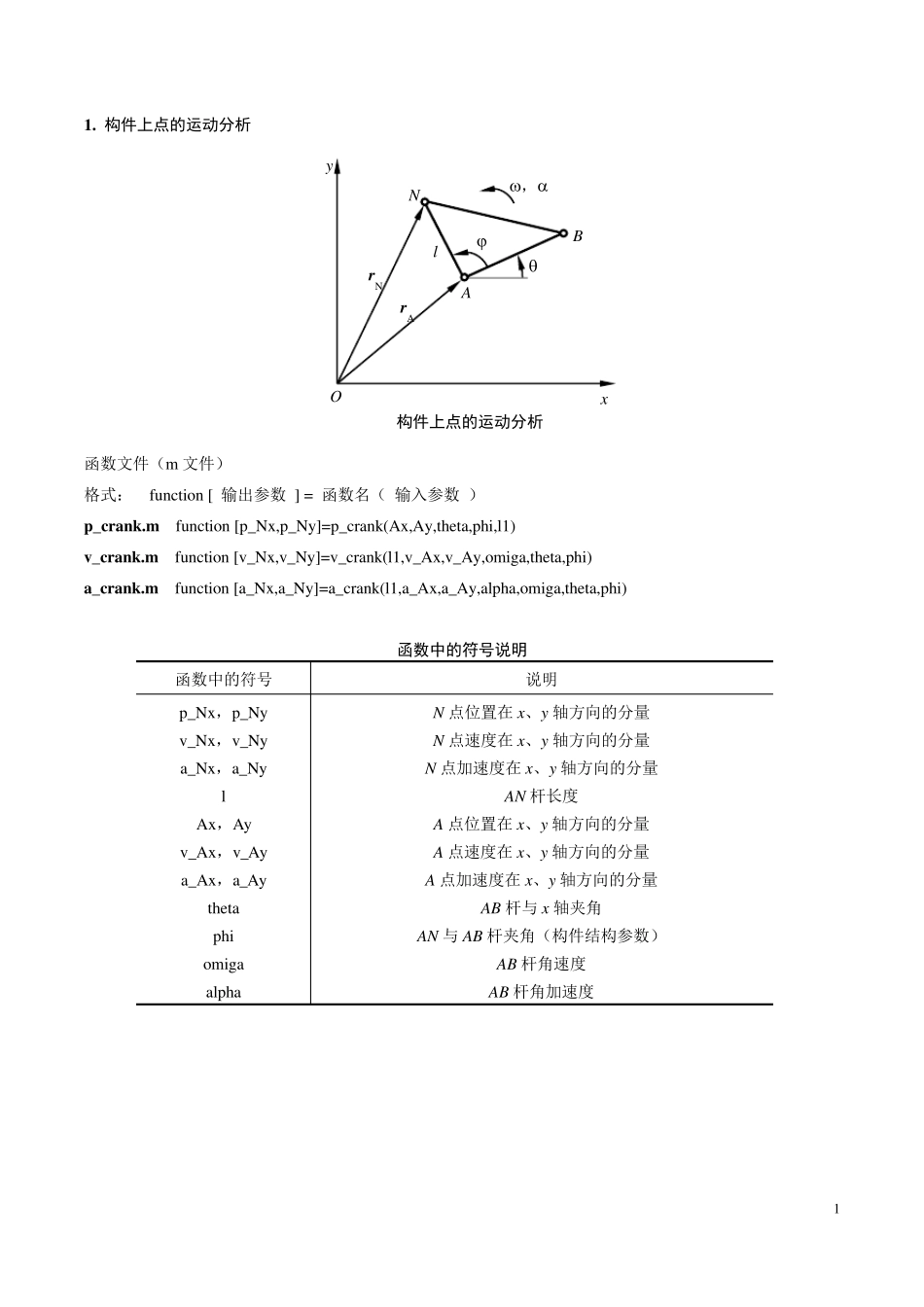
构件上点的运动分析 函数文件(m 文件) 格式: fu nction [ 输出参数 ] = 函数名( 输入参数 ) p_crank
m fu nction [p_Nx ,p_Ny ]=p_crank(Ax ,Ay ,theta,phi,l1) v_crank
m fu nction [v _Nx ,v _Ny ]=v _crank(l1,v _Ax ,v _Ay ,omiga,theta,phi) a_crank
m fu nction [a_Nx ,a_Ny ]=a_crank(l1,a_Ax ,a_Ay ,alpha,omiga,theta,phi) 函数中的符号说明 函数中的符号 说明 p_Nx ,p_Ny v _Nx ,v _Ny a_Nx ,a_Ny l Ax ,Ay v _Ax ,v _Ay a_Ax ,a_Ay theta phi omiga alpha N 点位置在x 、y 轴方向的分量 N 点速度在x 、y 轴方向的分量 N 点加速度在x 、y 轴方向的分量 AN 杆长度 A 点位置在x 、y 轴方向的分量 A 点速度在x 、y 轴方向的分量 A 点加速度在x 、y 轴方向的分量 AB 杆与 x 轴夹角 AN 与 AB 杆夹角(构件结构参数) AB 杆角速度 AB 杆角加速度 构件上点的运动分析 A l rN N x O y B rA , 2 2
RRRⅡ级杆组运动分析 函数文件(m 文件) 格式: fu nction [ 输出参数 ] = 函数名( 输入参数 ) p_RRR
m fu nction [cx ,cy ,theta2,theta3]=p_RRR(bx ,by ,dx ,dy ,l2,l3,m) v_RRR
m fu nction [v cx ,v cy ,omiga2,omiga3]=v _RRR(v bx ,v by