机器人视觉传感技术及应用摘要:机器人视觉技术是指机器人工作时通过视觉传感器对环境物体获取视觉信息,让机器人识别物体来进行各种工作
本文介绍了机器人技术中所常用的视觉传感器的种类、结构
介绍了弧焊机器人视觉传感技术较为前沿的一些应用和研究,包括焊缝跟踪和获取熔池信息
简要说明了视觉技术在农业采摘机器人方面的应用
关键词:机器人、视觉、弧焊、采摘机器人1.绪论机器人视觉是使机器人具有视觉感知功能的系统
机器人视觉可以通过视觉传感器获取环境的一维、二维和三维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置及各种状态
机器人视觉视觉侧重于研究以应用为背景的专用视觉系统,只提供对执行某一特定任务相关的景物描述
机器人视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器、模拟-数字转换器和帧存储器等组成
根据功能不同,机器人视觉可分为视觉检验和视觉引导两种,广泛应用于电子、汽车、机械等工业部门和医学、军事领域
机器人常用的视觉传感器2
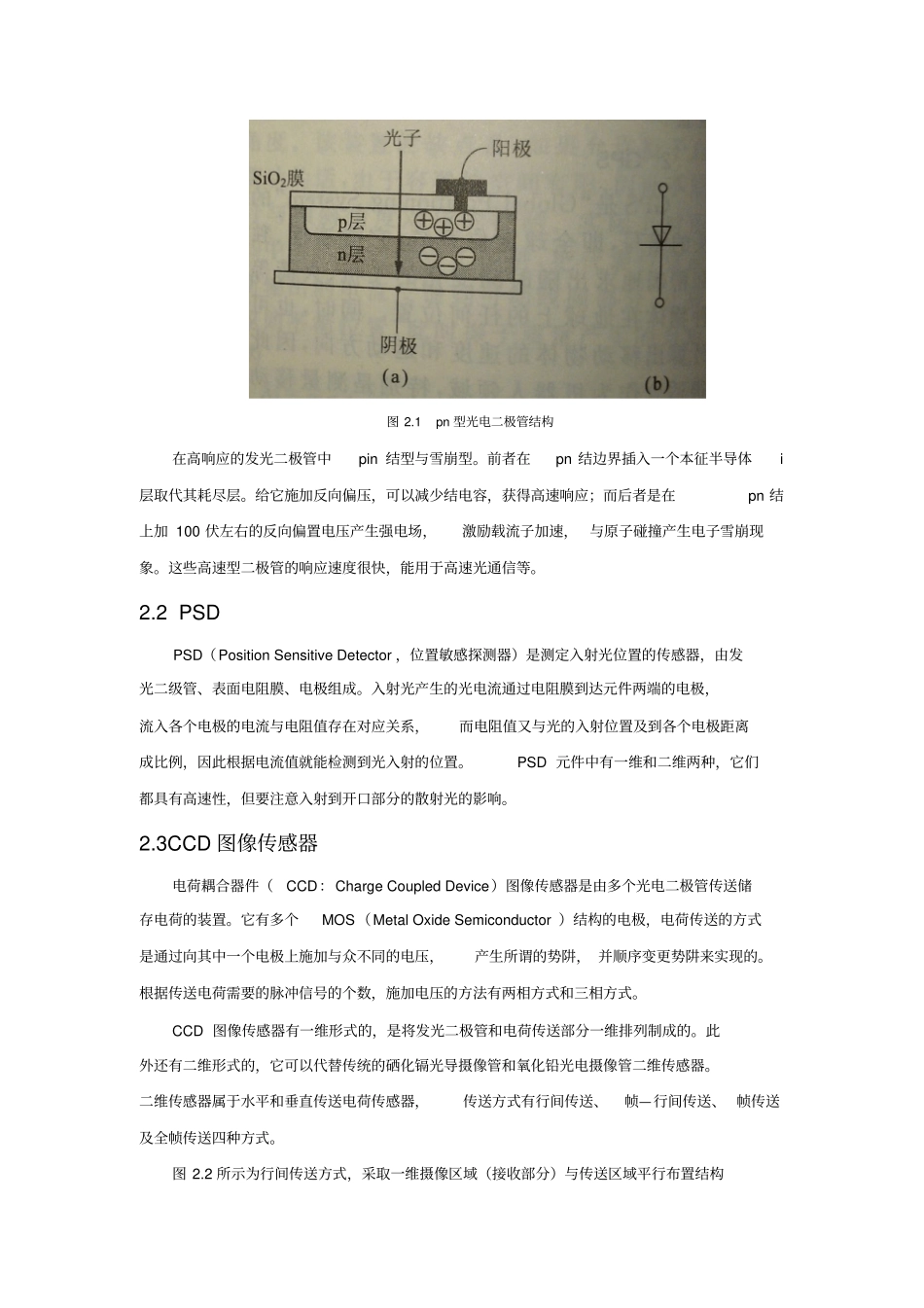
1 光电二极管与光电转换器件图 2
1 是 pn 型光电二级管的结构
如果让光子射入半导体的pn 结边界耗尽层,就会激励起新的空穴
利用电场将空穴和电子分离到两侧,就可以的到与光子量成比例的反向电流
Pn 型元件的优点是暗电流小,所以被广泛用于照度计和分广度计等测量装置中
1 pn 型光电二极管结构在高响应的发光二极管中pin 结型与雪崩型
前者在pn 结边界插入一个本征半导体i层取代其耗尽层
给它施加反向偏压,可以减少结电容,获得高速响应;而后者是在pn 结上加 100 伏左右的反向偏置电压产生强电场,激励载流子加速, 与原子碰撞产生电子雪崩现象
这些高速型二极管的响应速度很快,能用于高速光通信等
2 PSD PSD(Position Sensitive D