epe''' c''' e' c' b'' e'' b' 第五章机构运 动学分析本章学习任务:基于速度瞬心法的机构速度分析,基于矢量方程图解法的平面机构运动分析,基于解析法的平面机构运动分析
驱动项目的任务安排:项目中机构的运动分析,采用Matlab 编程计算
3基于矢量方程图解法的平面机构运动分析构件的平面平行运动可视为构件上任一点(称为基点)的牵连移动和该构件绕基点的相对转动所组成;牵连移动的速度和加速度等于所选基点的速度和加速度,绕基点的相对转动角速度和角加速度等于该构件的角速度和角加速度
根据这一相对运动原理可列出构件上任一点的矢量方程,然后按一定比例画出相应的矢量多边形,由此解出机构上各点的速度和加速度以及各构件的角速度和角加速度
根据不同的相对运动情况,机构的运动分析可按以下两类讨论
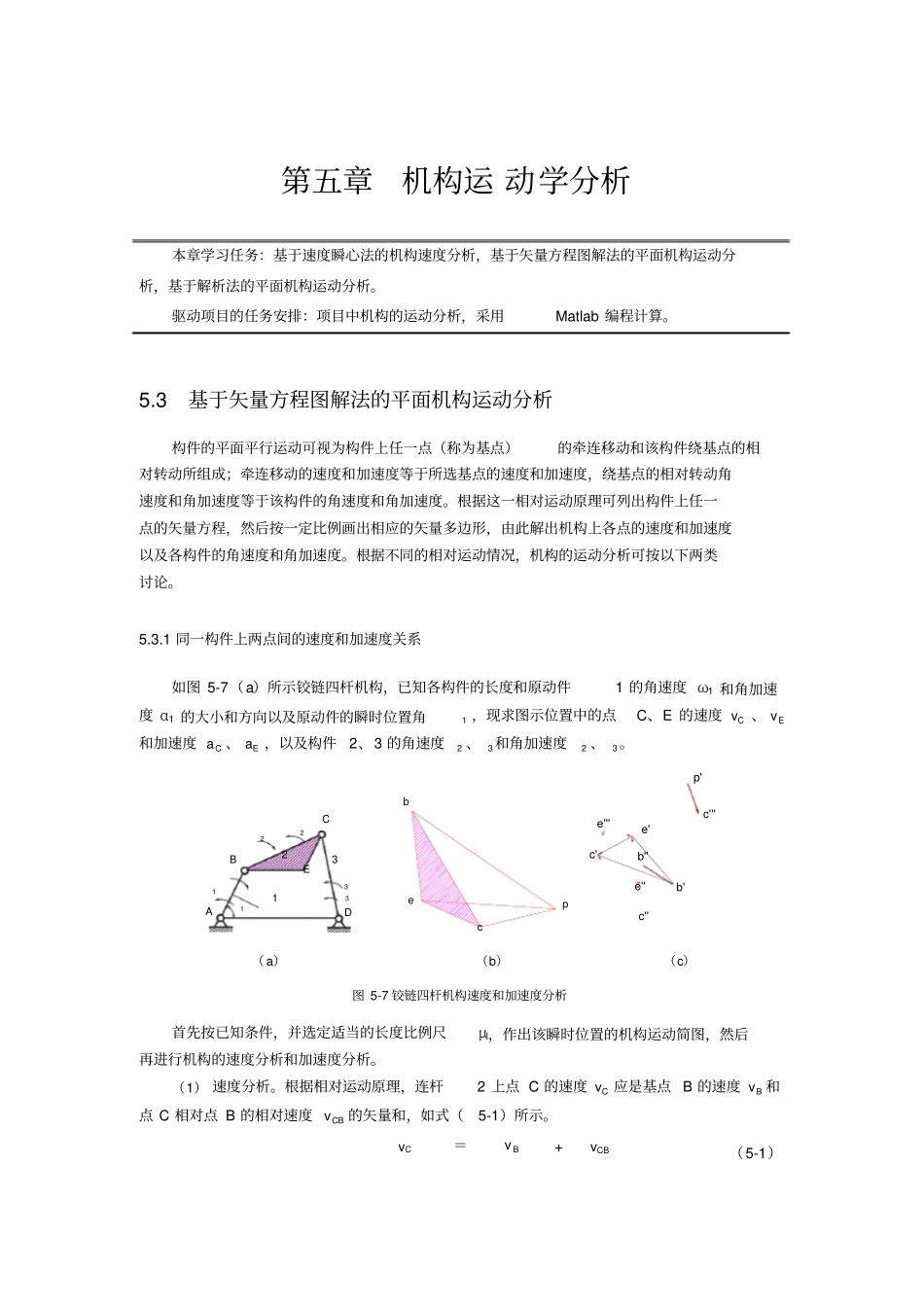
1 同一构件上两点间的速度和加速度关系如图 5-7(a)所示铰链四杆机构,已知各构件的长度和原动件1 的角速度 ω1 和角加速度 α1 的大小和方向以及原动件的瞬时位置角1 ,现求图示位置中的点C、E 的速度 vC 、 vE和加速度 aC 、 aE ,以及构件2、3 的角速度2 、3和角加速度2 、3
p'bC2 2B 2 3E1 131A 1Dcc'' ( a)(b)(c)图 5-7 铰链四杆机构速度和加速度分析首先按已知条件,并选定适当的长度比例尺μl,作出该瞬时位置的机构运动简图,然后再进行机构的速度分析和加速度分析
(1) 速度分析
根据相对运动原理,连杆2 上点 C 的速度 vC 应是基点 B 的速度 vB 和点 C 相对点 B 的相对速度vCB 的矢量和,如式(5-1)所示
vC =v B+ vCB