机械基础课程知识要点梳理(一)绪论1、机械、机器、机构、构件、零件的基本概念机械:机器和机构的总称
机器:是执行机械运动的装置,用来传递或变换能量、物料和信息
一般具有以下特征:①由若干个机构和构件组成的人为组合体,②具有确定相对运动,③可用来变换、传递能量完成有用的机械功
一般包括四个部分:动力部分、传动部分、作业部分和控制部分
机构:由若干个构件组成的具有确定相对运动的人为组合体,在机器中起着改变运动速度、运动方向和运动形式的作用
构件:机器中的运动单元体,具有相同的运动速度、运动方向和运动形式
零件:机器中的制造单元体
2、机器的共同特征、机构的共同特征、机器和机构的区别(二)平面机构的运动简图及其自由度1、运动副的概念及其分类( 1)定义机构中,两构件直接接触而又能产生—定相对运动的联接称为运动副
运动副的三要素:两构件组成;直接接触;有相对运动
( 2)分类2、自由度、约束等基本概念( 1)自由度一个自由构件在未与其他构件组成运动副前,在平面中有3 个自由度:①沿 x 轴的移动
②沿 y 轴的移动
③绕垂直于Oxy 平面的 z 轴转动
( 2)约束作平面运动的自由构件有3 个自由度
当它与另一构件组成运动副后,构件间直接接触使从动件运动受到限制,自由度便减少
这种对独立运动所加的限制称为约束
①低副:两个约束,一个自由度
②高副:一个约束,两个自由度
3、平面机构自由度计算( 1)定义机构的自由度是机构所具有的独立运动的数目
( 2)公式F=3n-2PL-PH式中, n――机构中活动构件数;PL――低副数; PH——高副数
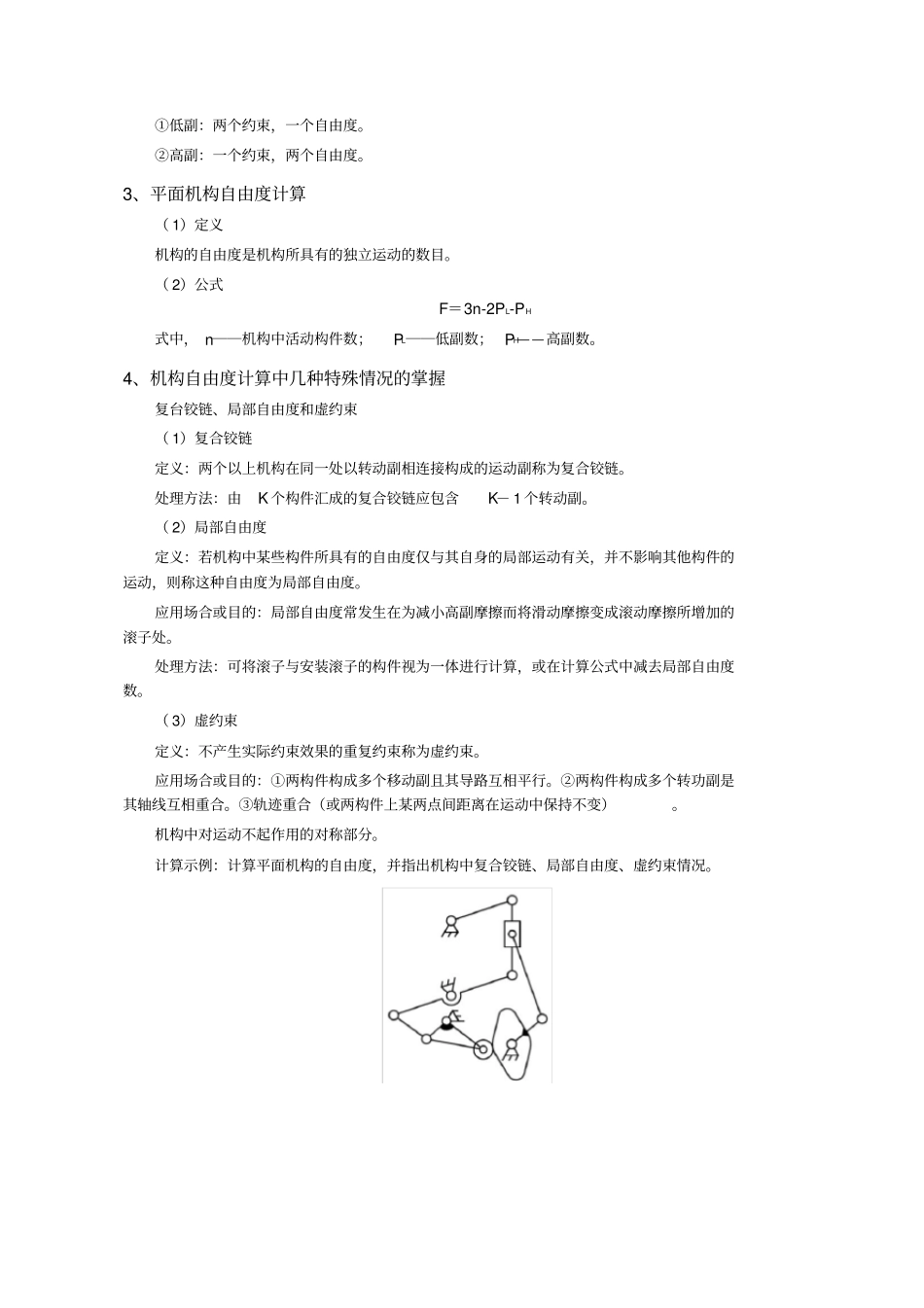
4、机构自由度计算中几种特殊情况的掌握复台铰链、局部自由度和虚约束( 1)复合铰链定义:两个以上机构在同一处以转动副相连接构成的运动副称为复合铰链
处理方法:由K 个构件汇成的复合铰链应包含K- 1 个转动副
( 2)局部自由度定义:若机构中某