第九章轮系一、问答题1、什么是惰轮
它在轮系中起什么作用
2、在定轴轮系中,如何来确定首、末轮之间的转向关系
3、什么叫周转轮系的“转化机构”
它在计算周转轮系传动比中起什么作用
4、计算混合轮系传动比的基本思路是什么
能否通过给整个轮系加上一个公共的角速度(– ω )的方法来计算整个轮系的传动比
5、 周转轮系中各轮齿数的确定需要满足哪些条件
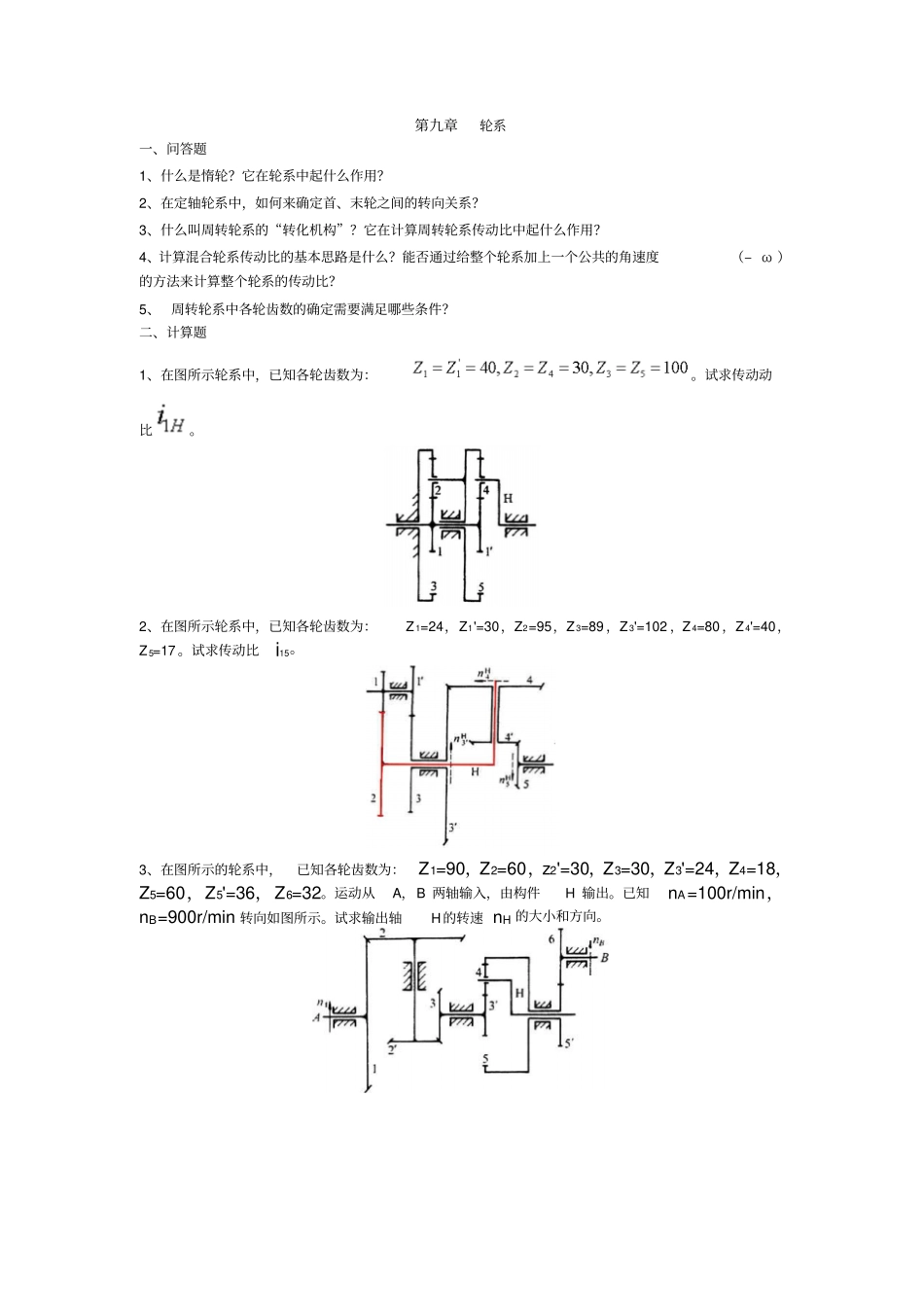
二、计算题1、在图所示轮系中,已知各轮齿数为:
试求传动动比
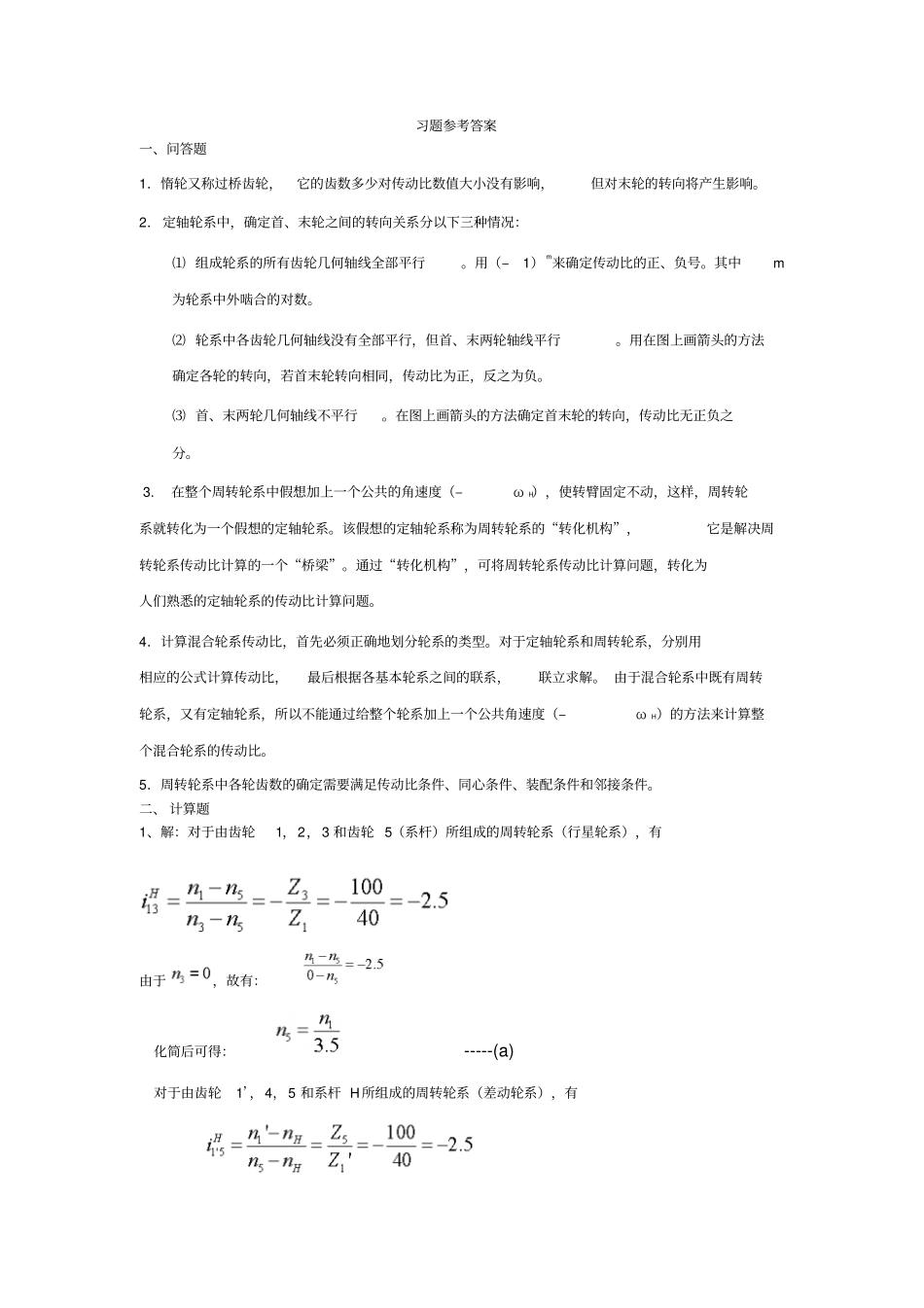
2、在图所示轮系中,已知各轮齿数为:Z 1=24,Z1'=30,Z2=95,Z 3=89 ,Z 3'=102 ,Z 4=80 ,Z 4'=40,Z 5=17
试求传动比i15
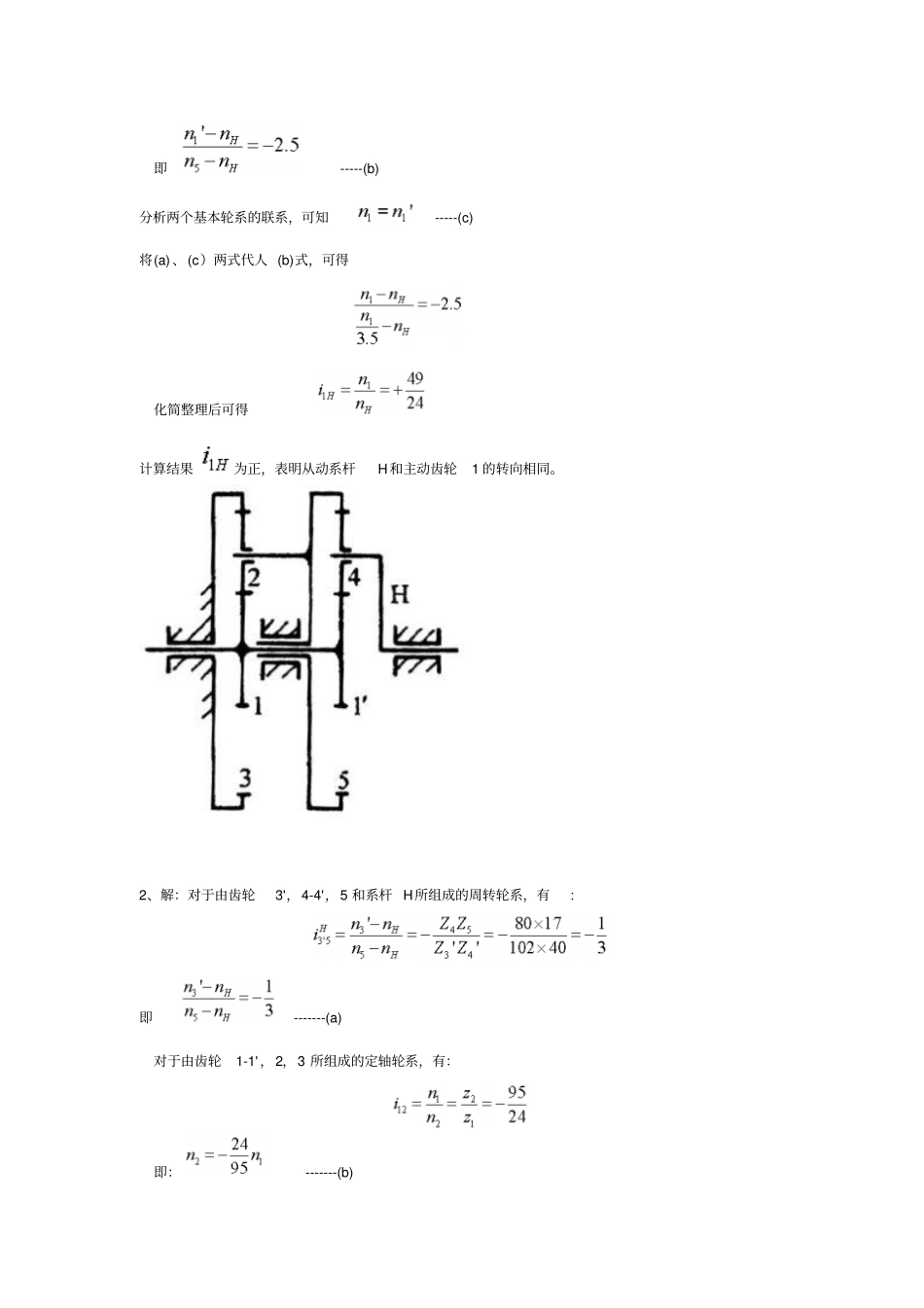
3、在图所示的轮系中,已知各轮齿数为: Z1=90,Z2=60,z2'=30,Z3=30,Z3'=24,Z4=18,Z5=60,Z5'=36,Z6=32
运动从A,B 两轴输入,由构件H 输出
已知nA=100r/min,nB=900r/min 转向如图所示
试求输出轴H的转速 nH 的大小和方向
习题参考答案一、问答题1.惰轮又称过桥齿轮,它的齿数多少对传动比数值大小没有影响,但对末轮的转向将产生影响
2.定轴轮系中,确定首、末轮之间的转向关系分以下三种情况:⑴ 组成轮系的所有齿轮几何轴线全部平行
用(–1)m来确定传动比的正、负号
其中m为轮系中外啮合的对数
⑵ 轮系中各齿轮几何轴线没有全部平行,但首、末两轮轴线平行
用在图上画箭头的方法确定各轮的转向,若首末轮转向相同,传动比为正,反之为负
⑶ 首、末两轮几何轴线不平行
在图上画箭头的方法确定首末轮的转向,传动比无正负之分
在整个周转轮系中假想加上一个公共的角速度(–ω H),使转臂固定不动,这样,周转轮系就转化为一个假想的定轴轮系
该假想的定轴轮系称为周转轮系的“转化机构”