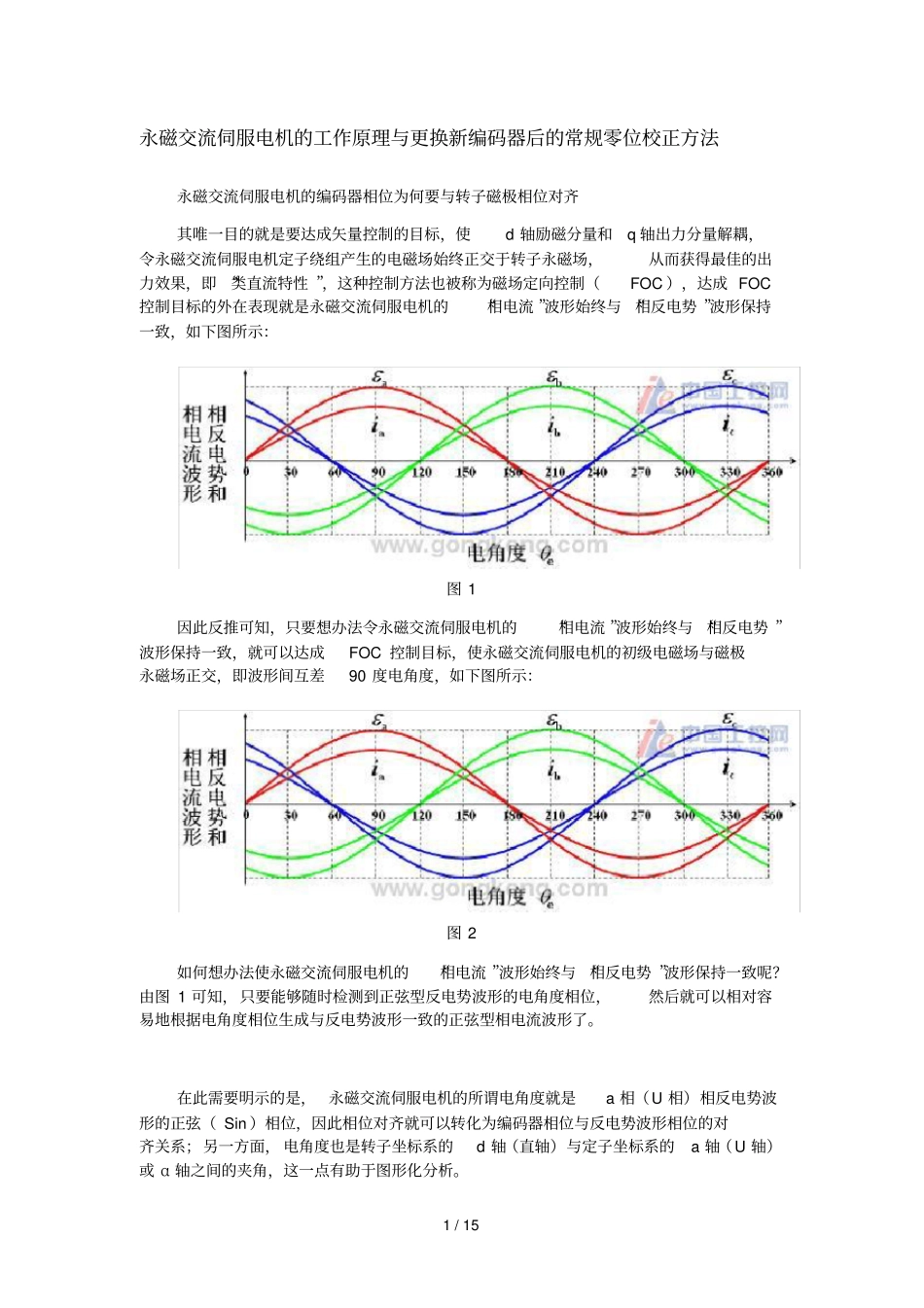
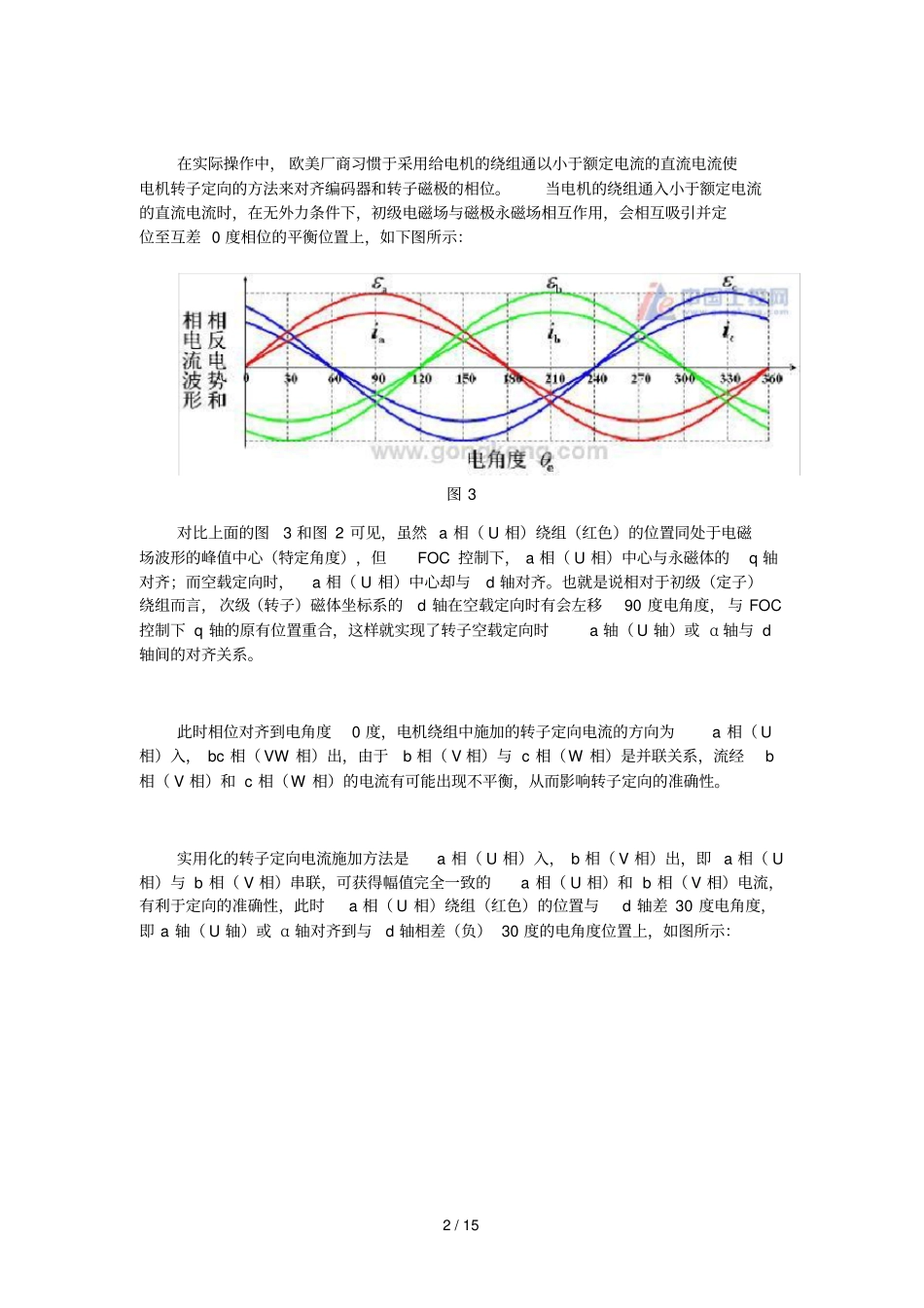
1 / 15 永磁交流伺服电机的工作原理与更换新编码器后的常规零位校正方法永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐其唯一目的就是要达成矢量控制的目标,使d 轴励磁分量和q 轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即 “类直流特性 ”,这种控制方法也被称为磁场定向控制(FOC ),达成 FOC控制目标的外在表现就是永磁交流伺服电机的“相电流 ”波形始终与 “相反电势 ”波形保持一致,如下图所示:图 1 因此反推可知,只要想办法令永磁交流伺服电机的“相电流 ”波形始终与 “相反电势 ”波形保持一致,就可以达成FOC 控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,即波形间互差90 度电角度,如下图所示:图 2 如何想办法使永磁交流伺服电机的“相电流 ”波形始终与 “相反电势 ”波形保持一致呢
由图 1 可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据电角度相位生成与反电势波形一致的正弦型相电流波形了
在此需要明示的是,永磁交流伺服电机的所谓电角度就是a 相(U 相)相反电势波形的正弦( Sin )相位,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系;另一方面, 电角度也是转子坐标系的d 轴(直轴)与定子坐标系的a 轴(U 轴)或 α 轴之间的夹角,这一点有助于图形化分析
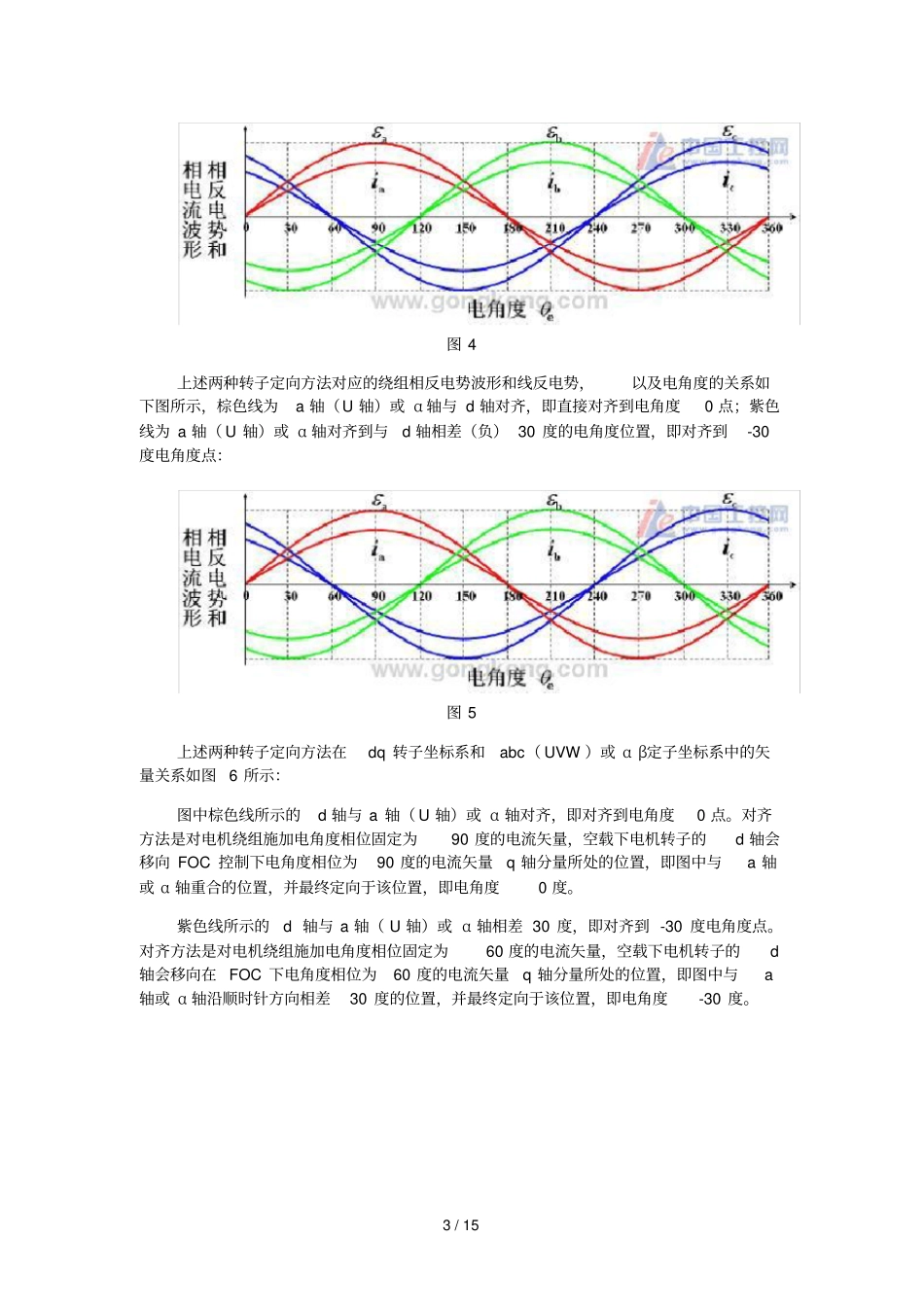
2 / 15 在实际操作中, 欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子定向的方法来对齐编码器和转子磁极的相位
当电机的绕组通入小于额定电流的直流电流时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差 0 度相位的平衡位置上,如下图所示:图 3 对比上面的图3 和图 2 可见,虽然 a 相( U 相)绕组(红色)的位置同处于电磁场波形的峰值