什么是PID PID 控制是比例积分微分控制的简称
PID 控制器早在 30 年代末期就已出现
除了在最简单情况下应用的开关控制外,它是当时唯一的控制方式
经过 50 多年来的不断更新换代,PID 控制得到了长足的发展
特别是近年来,随着计算机技术的飞速发展,发生了由模拟PID 控制到数字PID 控制的重大转变
与此同时还涌现出了许多新型 PID 控制算法和控制方式
例如,非线性 PID 控制、自适应 PID控制、智能 PID 控制等等
到目前为止,PID 控制仍然是历史最久、生命力最强的基本控制方式
这是因为 PID 控制具有如下优点
1) PID 控制原理简单,使用方便,并且已经形成了一套完整的参数设计和参数整定方法,很容易为工程技术人员所掌握
2) PID 控制算法蕴涵了动态控制过程中过去、现在和将来的主要信息
通过对比例系数、积分时间常 数和微分时间常 数的适当调 整,可 以 达 到良 好 的控制效 果
3) PID 控制适应性强,可 以 广 泛 用于 电 气 传 动、伺 服 控制、化 工、热 工、冶 金 、炼 油 、造纸 、建 材 以 及 加 工制造 等各 个 生产 部 门
4) PID控制鲁 棒 性较 强,即 其 控制品 质 对控制对象 特性的变化 不十 分敏 感
5) PID 控制可 以 根 据 不同的需 要,针 对自身 的缺 陷 进 行 改 进 ,并形成了一系列 改 进 的算法
正 是由于 PID 控制具有上 述 许多优点,使得它仍然是在电 气 传 动和过程控制中应用最广 泛的基本控制方式
下面 将分别讨 论 PID 控制中的各 种 控制规 律
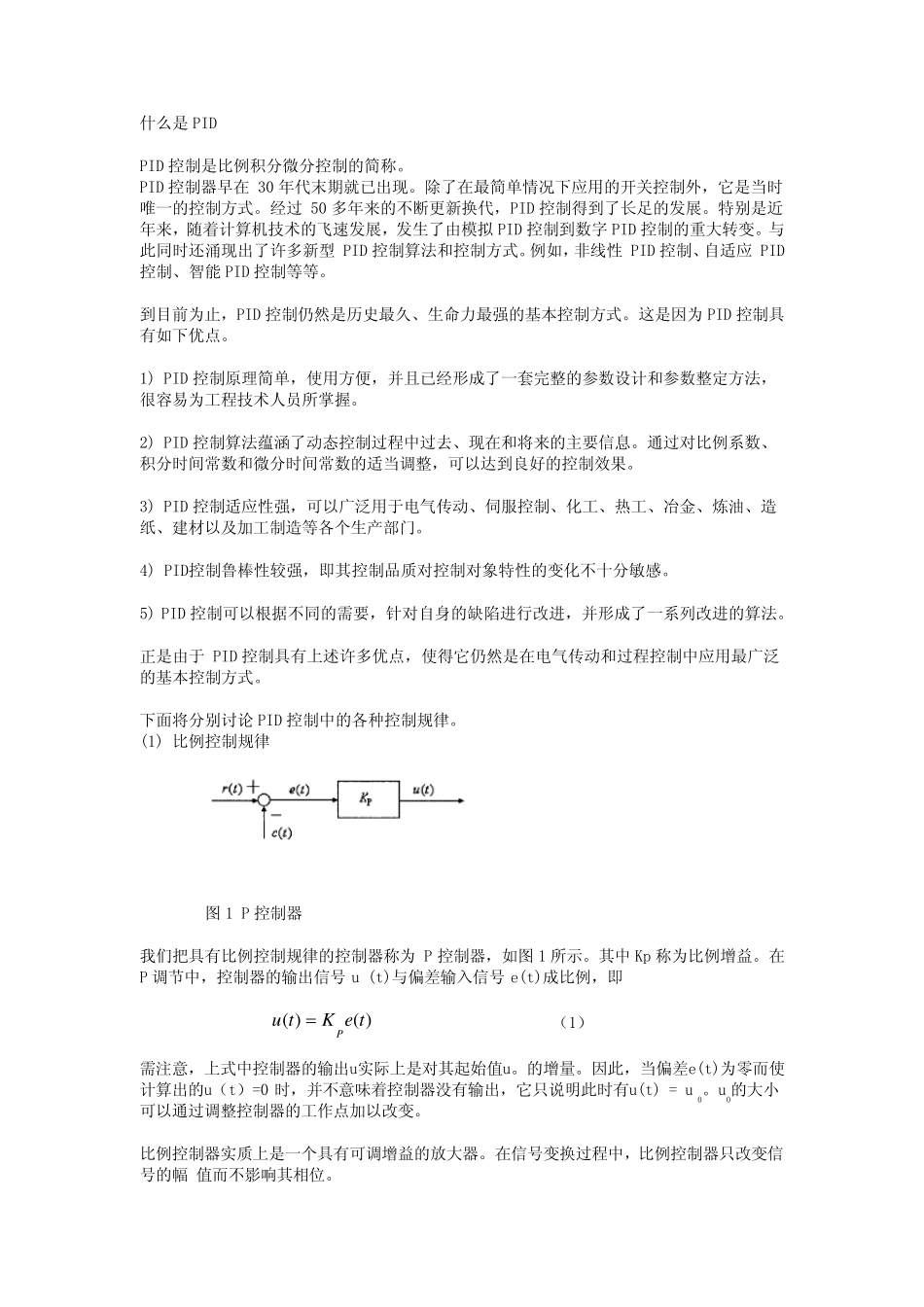
(1) 比例控制规 律 图 1 P 控制器 我 们 把 具有比例控制规 律 的控制器称为 P 控制器,如图 1 所示
其 中Kp 称为比例增 益
在 P 调 节 中,控制器的输 出信号