直流无刷电机转速控制1
模拟 PID 控制1
1 模拟 PID 控制原理在模拟控制系统中,最常用的控制器就是模拟 PID 控制器
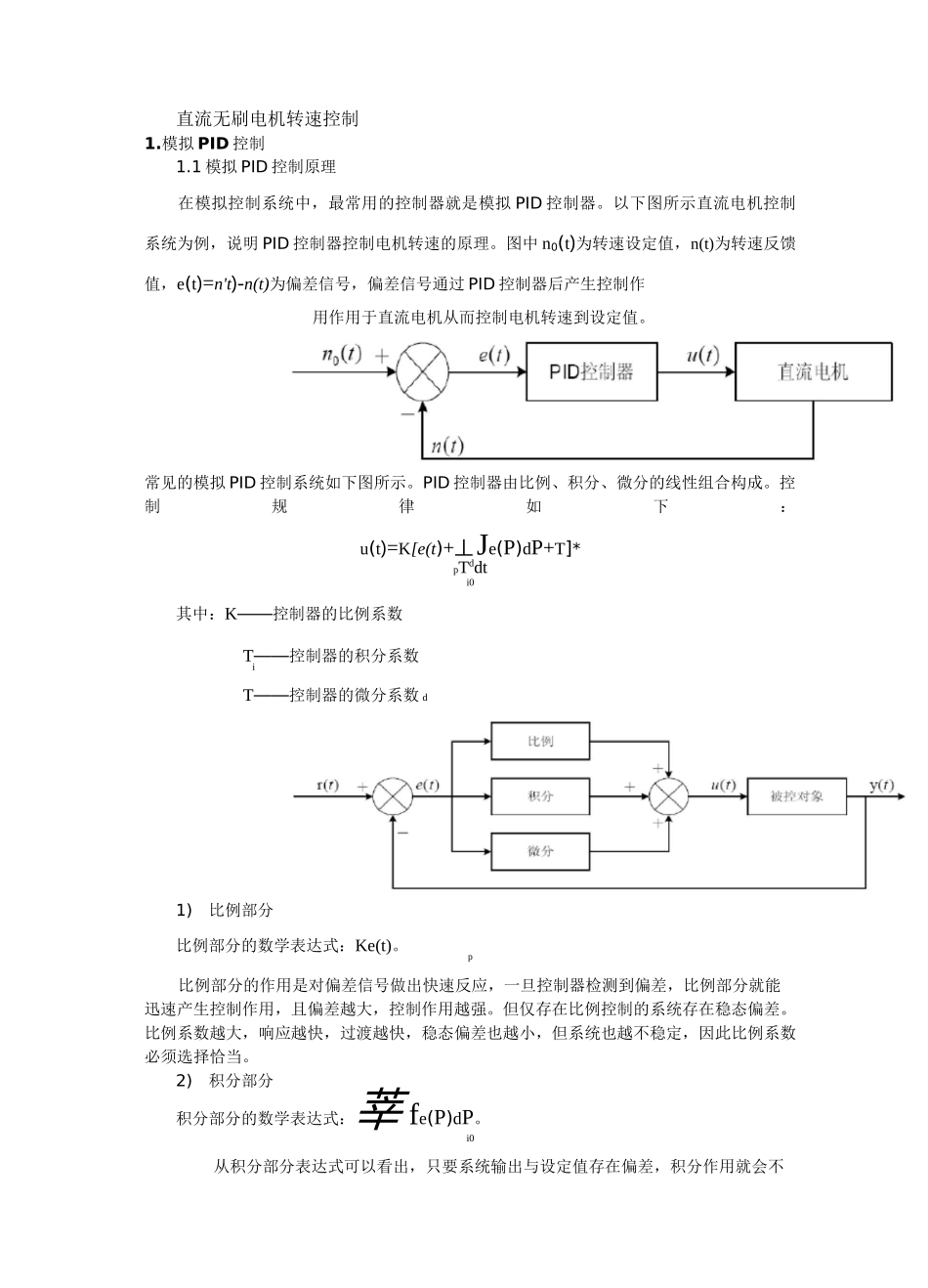
以下图所示直流电机控制系统为例,说明 PID 控制器控制电机转速的原理
图中 n0(t)为转速设定值,n(t)为转速反馈值,e(t)=n't)-n(t)为偏差信号,偏差信号通过 PID 控制器后产生控制作用作用于直流电机从而控制电机转速到设定值
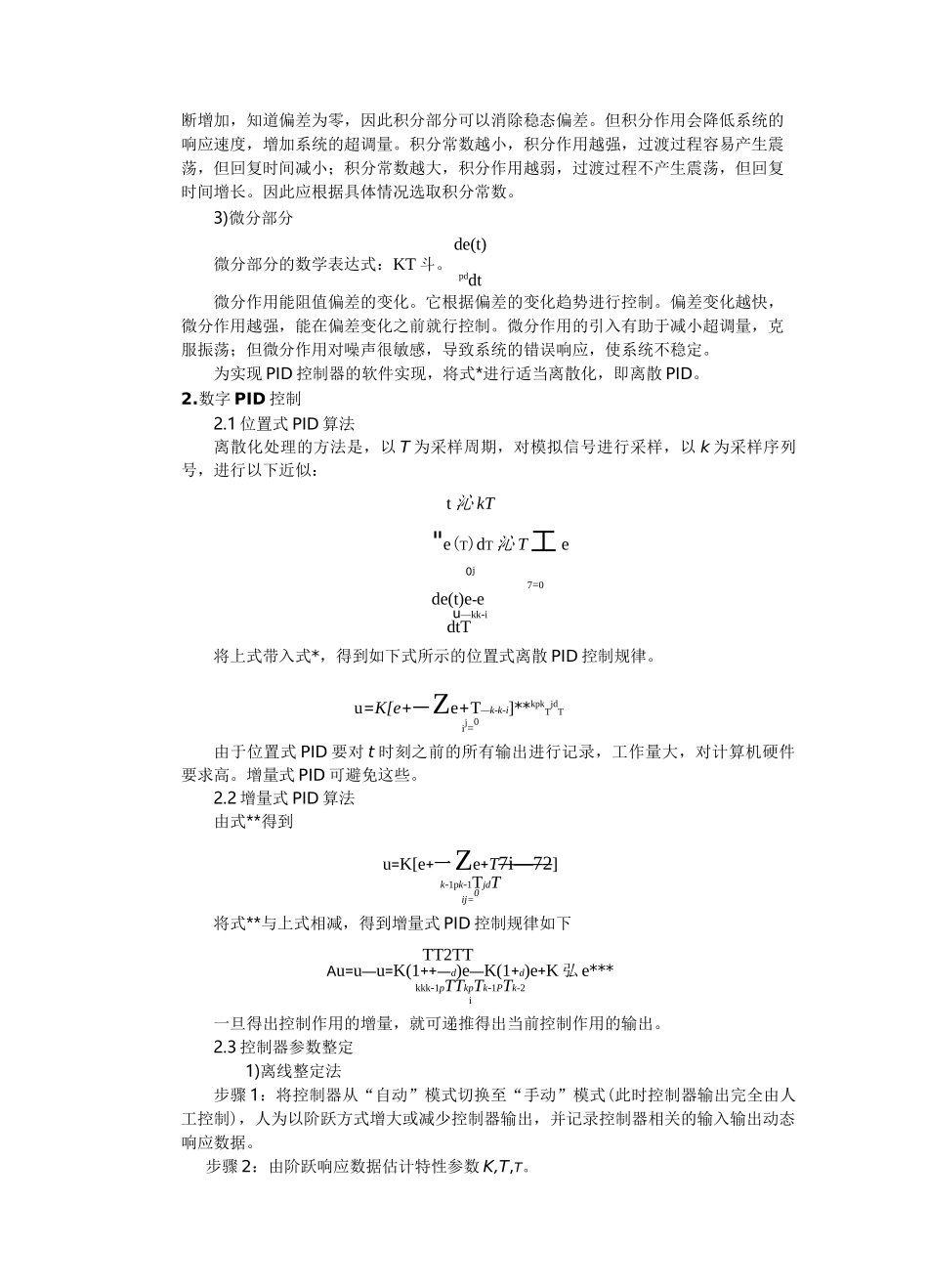
常见的模拟 PID 控制系统如下图所示
PID 控制器由比例、积分、微分的线性组合构成
控制规律如下:u(t)=K[e(t)+丄Je(P)dP+T]*pTddti0其中:K——控制器的比例系数T——控制器的积分系数iT——控制器的微分系数 d1)比例部分比例部分的数学表达式:Ke(t)
p比例部分的作用是对偏差信号做出快速反应,一旦控制器检测到偏差,比例部分就能迅速产生控制作用,且偏差越大,控制作用越强
但仅存在比例控制的系统存在稳态偏差
比例系数越大,响应越快,过渡越快,稳态偏差也越小,但系统也越不稳定,因此比例系数必须选择恰当
2)积分部分积分部分的数学表达式:莘 fe(P)dP
i0从积分部分表达式可以看出,只要系统输出与设定值存在偏差,积分作用就会不断增加,知道偏差为零,因此积分部分可以消除稳态偏差
但积分作用会降低系统的响应速度,增加系统的超调量
积分常数越小,积分作用越强,过渡过程容易产生震荡,但回复时间减小;积分常数越大,积分作用越弱,过渡过程不产生震荡,但回复时间增长
因此应根据具体情况选取积分常数
3)微分部分de(t)微分部分的数学表达式:KT 斗
pddt微分作用能阻值偏差的变化
它根据偏差的变化趋势进行控制
偏差变化越快,微分作用越强,能在偏差变化之前就行控制
微分作用的引入有助于减小超调量,克服振荡;但微分作用对噪声很敏感,导致系统的错误响应,使系统不稳定
为实现 PI