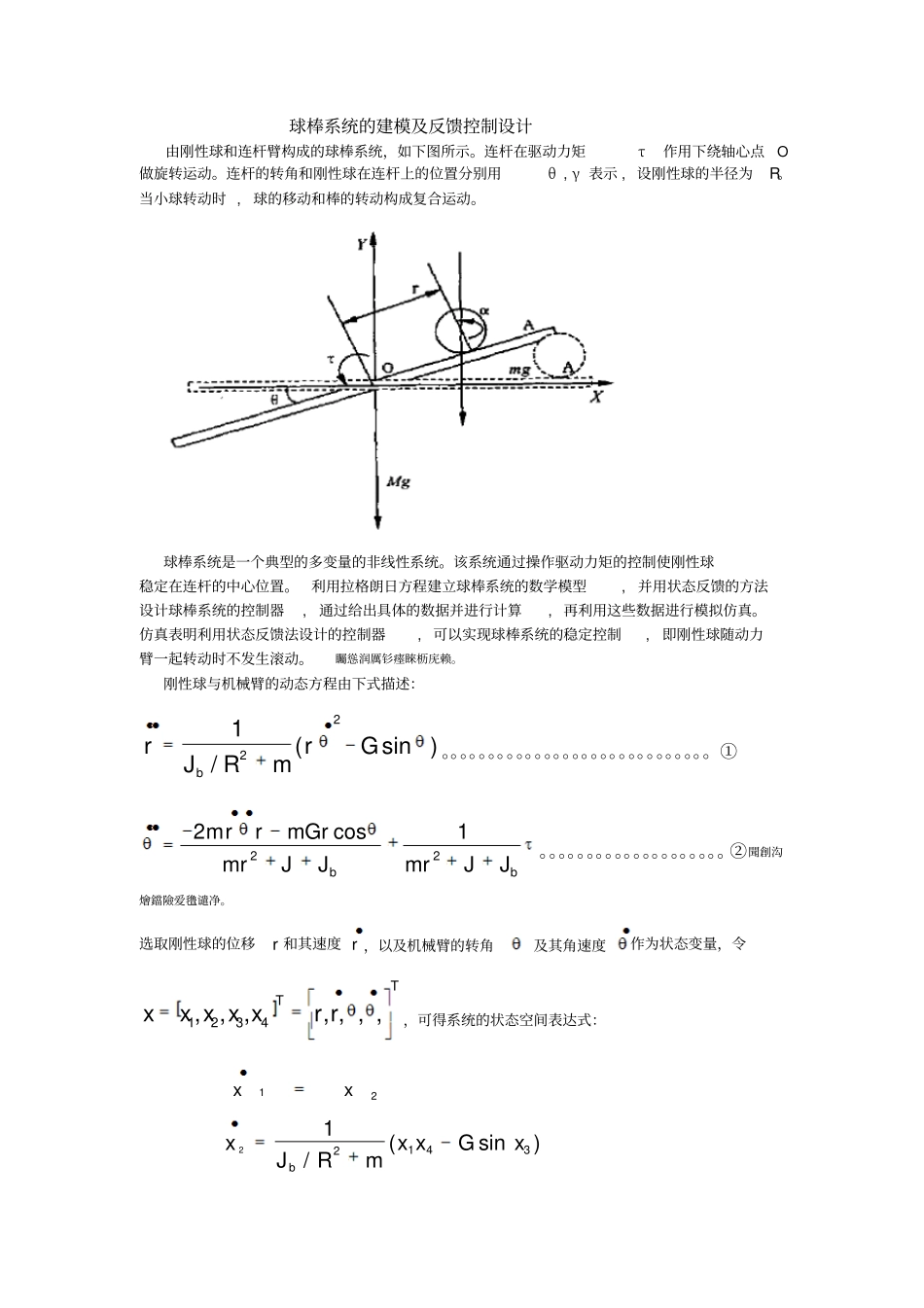
本科生课程设计(报告)题目: 球棒系统的建模及反馈控制设计姓名: 学院: 专业: 班级: 学号: 指导教师 : 2013 年 6 月 15 日南京农业大学教务处制球棒系统的建模及反馈控制设计由刚性球和连杆臂构成的球棒系统,如下图所示
连杆在驱动力矩τ作用下绕轴心点O做旋转运动
连杆的转角和刚性球在连杆上的位置分别用θ , γ 表示 , 设刚性球的半径为R
当小球转动时 , 球的移动和棒的转动构成复合运动
球棒系统是一个典型的多变量的非线性系统
该系统通过操作驱动力矩的控制使刚性球稳定在连杆的中心位置
利用拉格朗日方程建立球棒系统的数学模型, 并用状态反馈的方法设计球棒系统的控制器, 通过给出具体的数据并进行计算, 再利用这些数据进行模拟仿真
仿真表明利用状态反馈法设计的控制器, 可以实现球棒系统的稳定控制, 即刚性球随动力臂一起转动时不发生滚动
矚慫润厲钐瘗睞枥庑赖
刚性球与机械臂的动态方程由下式描述:221(sin)/brrGJRm
①222cos1bbmrrmGrmrJJmrJJ
②聞創沟燴鐺險爱氇谴净
选取刚性球的位移r 和其速度 r ,以及机械臂的转角及其角速度作为状态变量,令1234,, ,, , , ,TTxx x x xr r,可得系统的状态空间表达式:12xx214321(sin)/bxx xGxJRm34xx12413422112cos1bbmx x xmGxxxJmxJJmxJ设球棒系统各参数如下:0
01Rm ,20
02Jkgm62210bJkgm,29
81/Gms1
将系统在平衡点 x =0处线性化 , 求线性系统模型先求平衡点;令0x,解得:1234000eeeexmGxxx由题可知平衡点为0x处,故0mG即0
1111123