1 构建平面双连杆机械臂动态模型 1
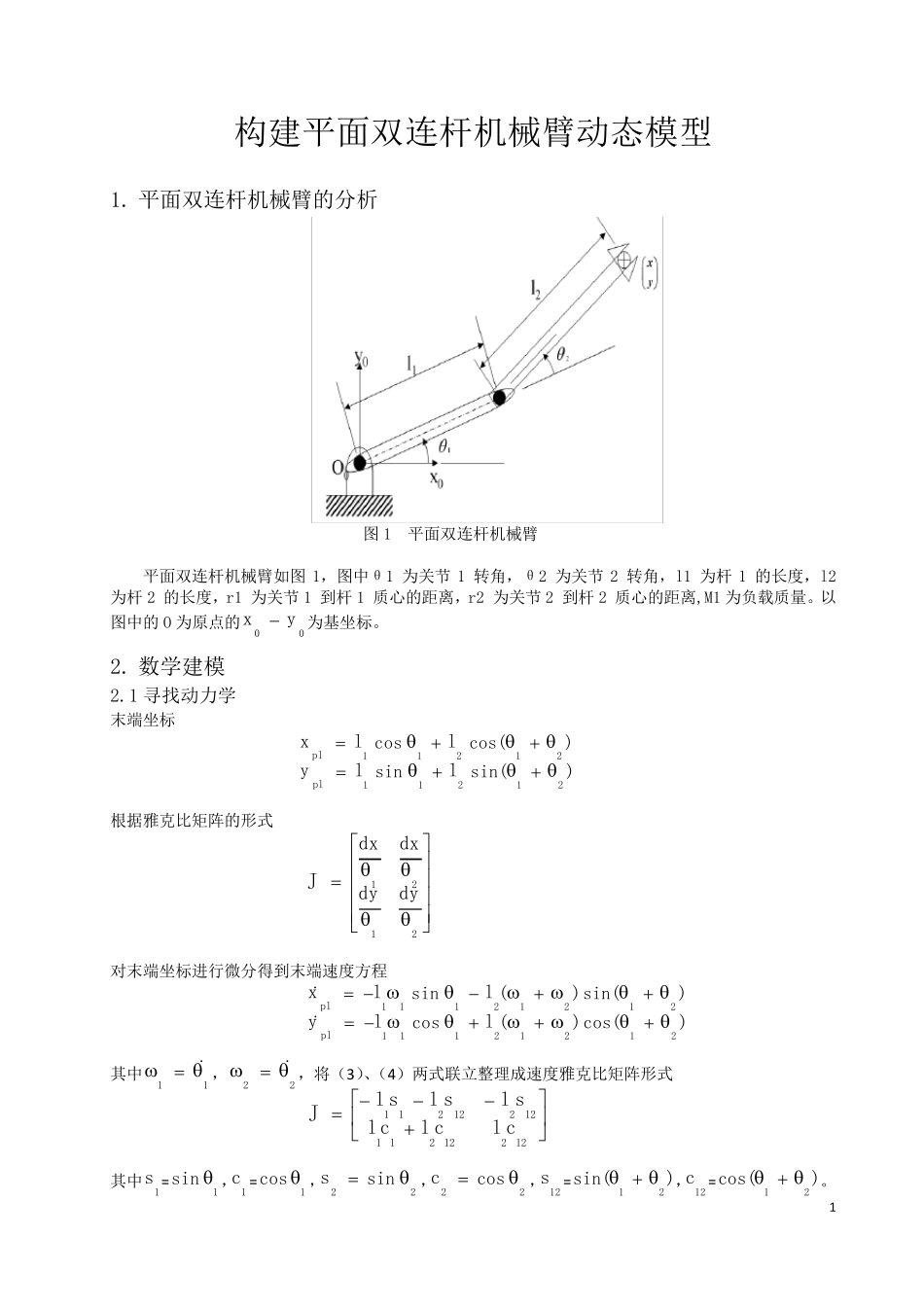
平面双连杆机械臂的分析 图1 平面双连杆机械臂 平面双连杆机械臂如图1,图中θ1 为关节 1 转角,θ2 为关节 2 转角,l1 为杆1 的长度,l2为杆2 的长度,r1 为关节 1 到杆1 质心的距离,r2 为关节 2 到杆2 质心的距离,M1 为负载质量
以图中的O 为原点的00yx为基坐标
数学建模 2
1 寻找动力学 末端坐标 )cos(cos21211llxpl )sin(sin21211llypl 根据雅克比矩阵的形式 2121dydydxdxJ 对末端坐标进行微分得到末端速度方程 )sin()(sin21212111llxpl )cos()(cos21212111llypl 其中11,22,将(3)、(4)两式联立整理成速度雅克比矩阵形式 1221221112212211clclclslslslJ 其中1s =1sin ,1c =1cos ,22sin s,22cos c,12s=)sin(21 ,12c =)cos(21
2 在机器人基础坐标系中的速度与各关节速度间的关系以及手部与外界接触力与对应各关节间的关系可以利用雅克比矩阵来建立
对机械臂末端速度方程(3) 、方程(4) 进行求导得到末端加速度方程如下 1221222122211221121221122112)()(clclclclslslslxpl 1221222122211221121221122112)()(slslslslslslslypl 其中1 =1 ,2 =2 ,上述推导的方程构成了进