一、 连接相机 1、 根据康耐视接线说明书接好相机,通过网线连接上电脑
在PC 端打开in-sight 浏览器
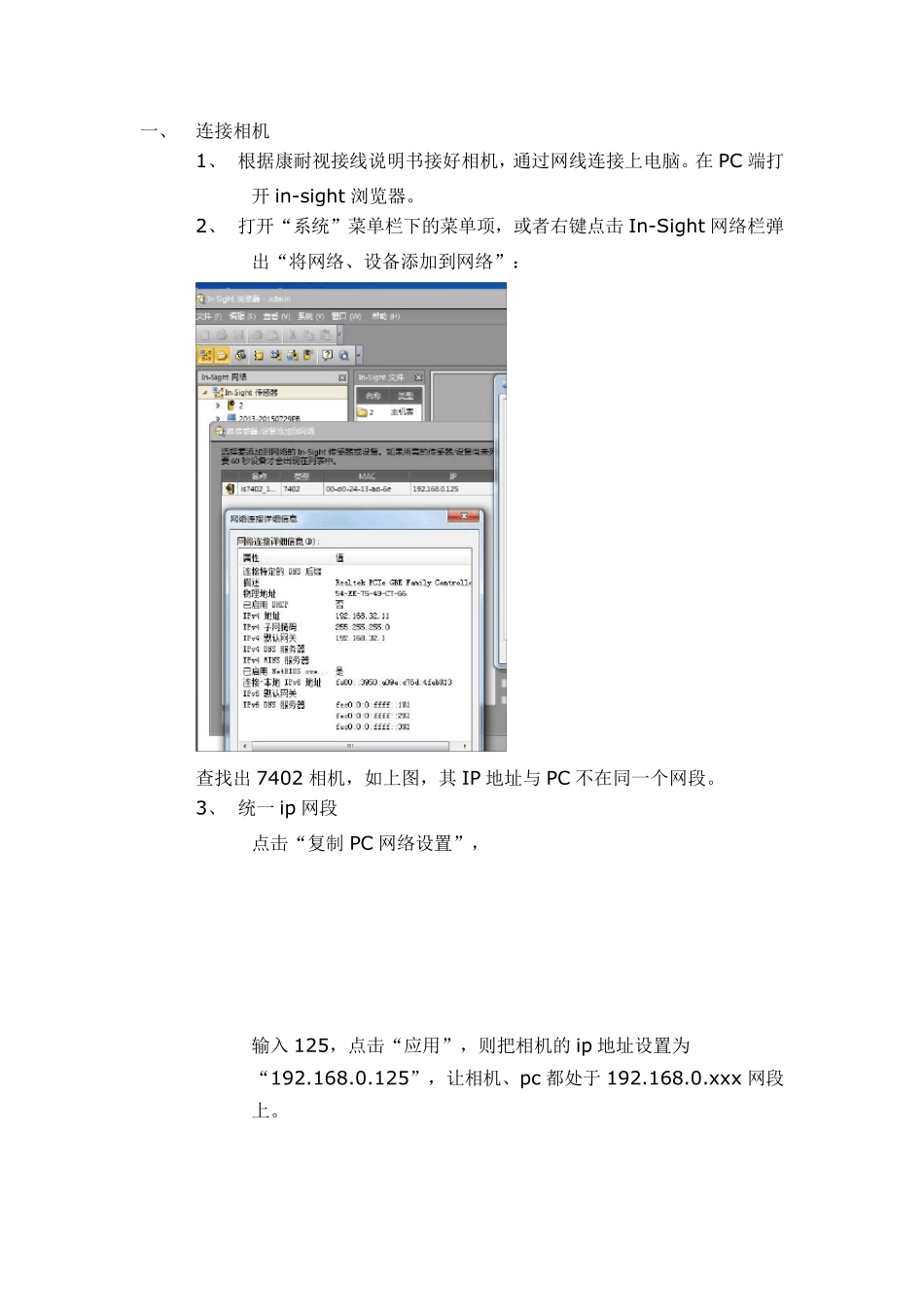
2、 打开“系统”菜单栏下的菜单项,或者右键点击 In-Sight 网络栏弹出“将网络、设备添加到网络”: 查找出 7402 相机,如上图,其 IP 地址与 PC 不在同一个网段
3、 统一ip 网段 点击“复制 PC 网络设置”, 输入 125,点击“应用”,则把相机的 ip 地址设置为“192
125”,让相机、pc 都处于 192
x x x 网段上
4、 打开相机 双击“is7402_13ad6e”,则打开相机,之前设置的开机自动加载的作业(如 pinwen
job)也打开
“传感器”-》“启动”,设置相机上电后是否自动联机,设置自动加载的作业
二、 新建作业(电子表格下) 1、转到电子表格视图 2、“文件”-》“新作业”,或者点击左上角相应工具 三、 设置拍照参数 双击“Image”,如下,设置触发模式和曝光时间等参数,这里设置为“手动”触发,即点击工具栏的触发图标或者按快捷键 F5 时,相机拍照
四、 校准 1、 calibrateGrid 将坐标变换下的 CalibrateGrid 函数拖到一空白的电子表格 B2: 点击“实况视频“,调整好标定板(或者标定纸,没有的话可以打印)和镜头焦距等,让标定板清晰现实在视野中央,双击鼠标(或者按 enter键): 点击“触发器”,则右上角现实找出的特征点数(276)
点击下方“校准”按钮: 点击“确定”按钮,则校准完成
2、 CalibrateImage 经过如此处理,实现了像素坐标系图像到毫米坐标系图像的映射
五、 训练模版 1、拿走标定板,把要查找的物品放到视野范围,按F5 拍照 2、函数栏里,“视觉工具”-》“图案匹配”-》TrainPatMax Pattern