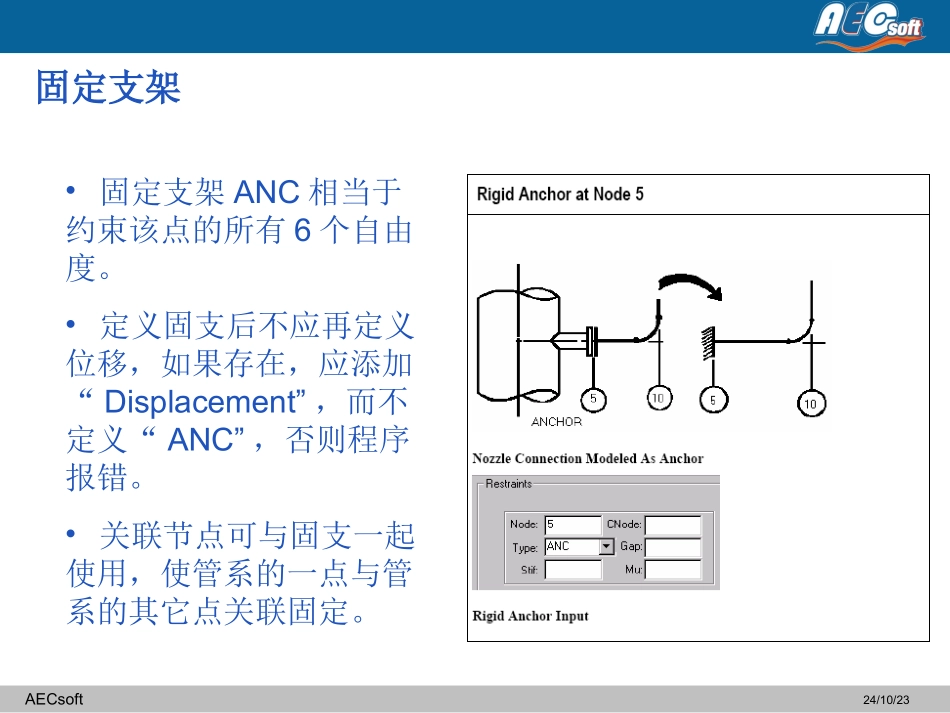
CAESARIICAESARII基本约束形式AECSOFT北京艾思弗计算机软件技术有限责任公司201024/10/23AECsoft固定支架•固定支架ANC相当于约束该点的所有6个自由度
•定义固支后不应再定义位移,如果存在,应添加“Displacement”,而不定义“ANC”,否则程序报错
•关联节点可与固支一起使用,使管系的一点与管系的其它点关联固定
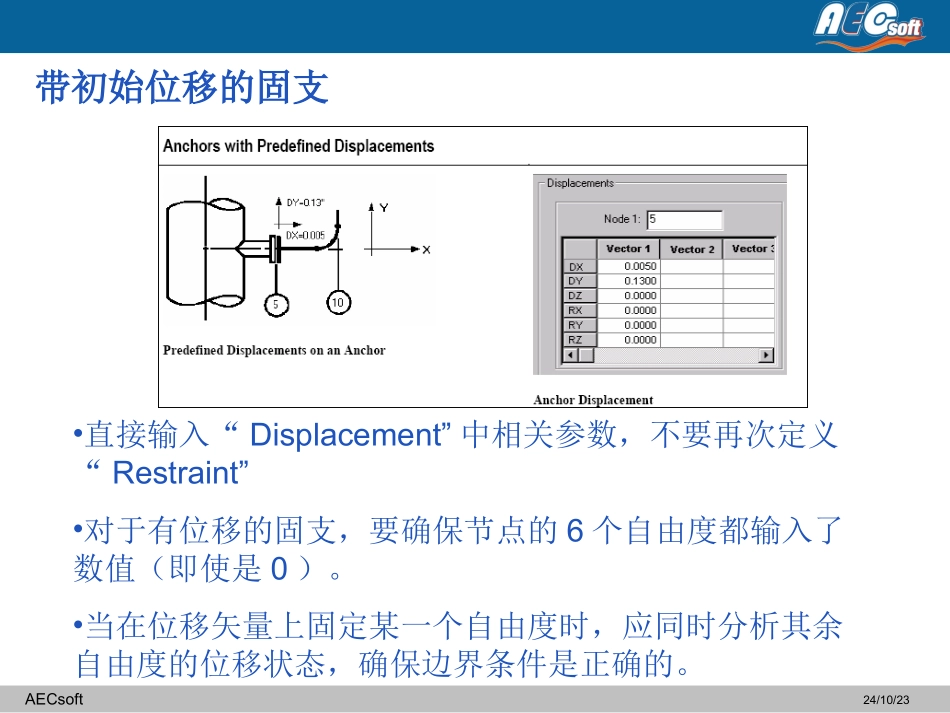
24/10/23AECsoft带初始位移的固支•直接输入“Displacement”中相关参数,不要再次定义“Restraint”•对于有位移的固支,要确保节点的6个自由度都输入了数值(即使是0)
•当在位移矢量上固定某一个自由度时,应同时分析其余自由度的位移状态,确保边界条件是正确的
24/10/23AECsoft柔性固支对于非刚性的固支,应分别考虑各自由度的刚度,定义6个约束,如图所示:24/10/23AECsoft有初始位移的柔性固支要模拟有初始位移的柔性固支,用户需按照下列的要求去做:使用6个柔性约束
将4个约束放在一个单元数据表中,其余两个放在另一个单元数据表中
在六个约束的每一个中均定义一个唯一的关联节点(CNODE)
所有的6个约束使用同一个关联节点
指定关联节点的位移
参照下图的设置
24/10/23AECsoft有初始位移的柔性固支•定义6个约束•6个自由度使用同一个关联节点(Cnode)
•在这个关联节点号上定义初始位移
•参考右图的设置
24/10/23AECsoft柔性管嘴(给定初始位移)模拟柔性管嘴时,用户需按照下面的要求来做:1
在所建立的管单元,其一侧端点为管嘴节点
不要设置这点的任何约束
不要设置这点的初始位移
激活柔性管嘴选项“Nozzle”
在相连单元定义容器一侧节点号及其初始位移6
在Nozzle中设置管嘴节点与容器节点关联
24/10/23AECsof