1 异步电动机的仿真 在课本中介绍的四种方式的状态方程,都是对异步电动机的数学描述,在进行异步电动机仿真时,没有必要对四种状态方程逐一进行,只要以其中一种作为内核,在外围加上坐标变换和状态变换,就可以得到在不同的坐标系下、不同状态量的仿真结果
因此,以异步电动机在αβ坐标系中ω − is − ψr为状态变量的状态方程结构为核心,构建异步电动机仿真模型
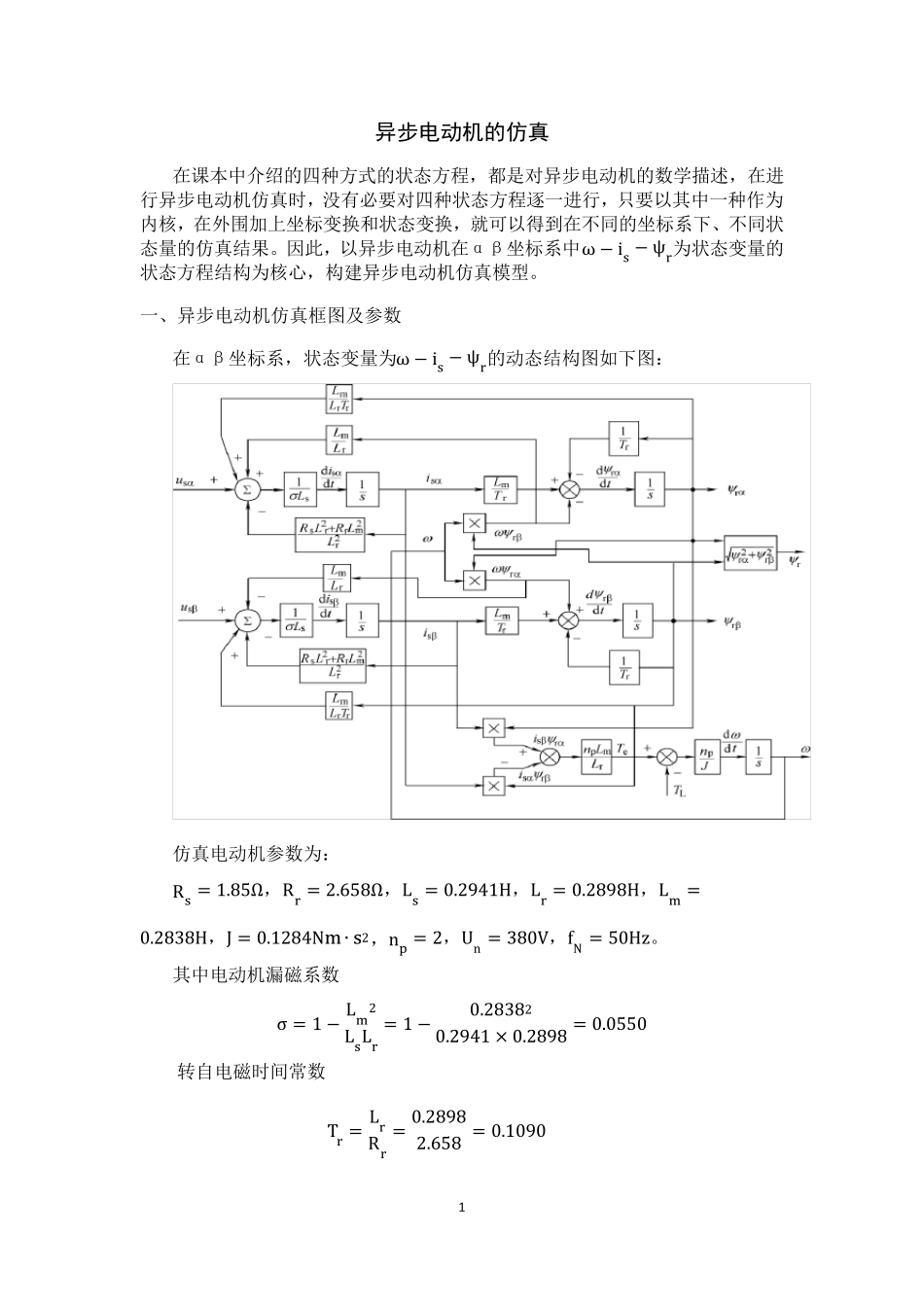
一、异步电动机仿真框图及参数 在αβ坐标系,状态变量为ω − is − ψr的动态结构图如下图: 仿真电动机参数为: Rs = 1
85Ω,Rr = 2
658Ω,Ls = 0
2941H,Lr = 0
2898H,Lm =0
2838H,J = 0
1284Nm∙ s2,np = 2,Un = 380V,fN = 50Hz
其中电动机漏磁系数 σ = 1 − Lm2LsLr= 1 −0
283820
2941 × 0
2898 = 0
0550 转自电磁时间常数 Tr = LrRr= 0
658 = 0
1090 2 LmLrTr=0
2898 × 0
1090 = 8
9819 LmLr= 0
2898 = 0
9793 1σLs=10
0550 × 0
2941 = 61
8219 RsLr2 + RrLm2Lr2= 1
85 × 0
28982 + 2
658 × 0
283820
28982= 4
3991 LmTr= 0
1090 = 2
6037 1Tr= 9
1718 npLmLr= 2 × 0
2898= 1
9586 npJ =20
1284 = 15
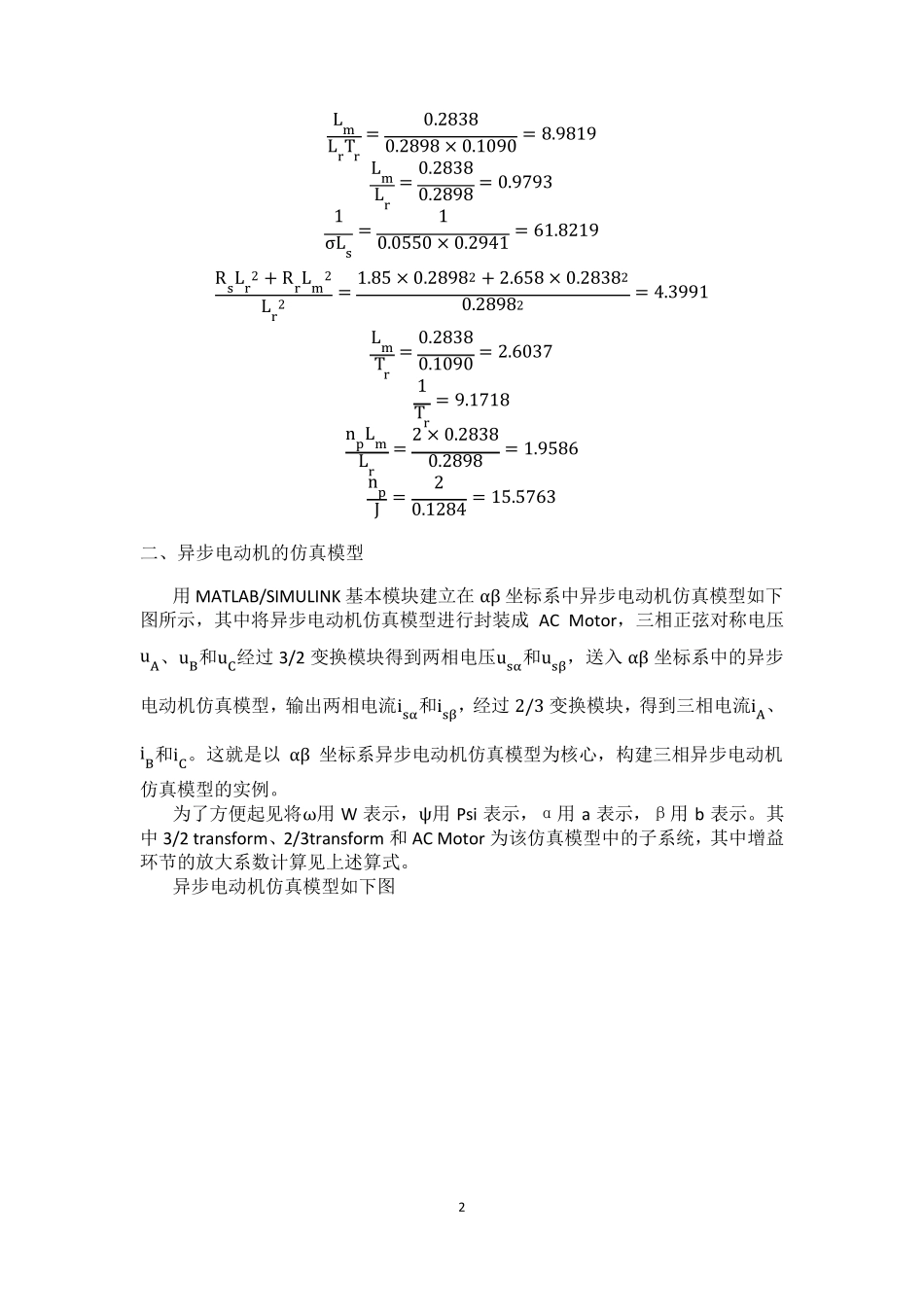
5763 二、异步电动机的仿真模型 用MATLAB/SIMULINK 基本模块建立在αβ 坐标系中异步电动机仿真模型如下图所示,其中将异步电动机仿真模型进行封装成AC Motor,三相正弦对称电