mg+N=0(1-2)(1-电机选型计算和涡轮蜗杆传动选型计算主要性能参数要求:履带底盘总重:40kg现取履带底盘平地行驶最大速度:lm/s,加速度:0
2m/s2爬坡最大速度:0
5m/s,加速度:0
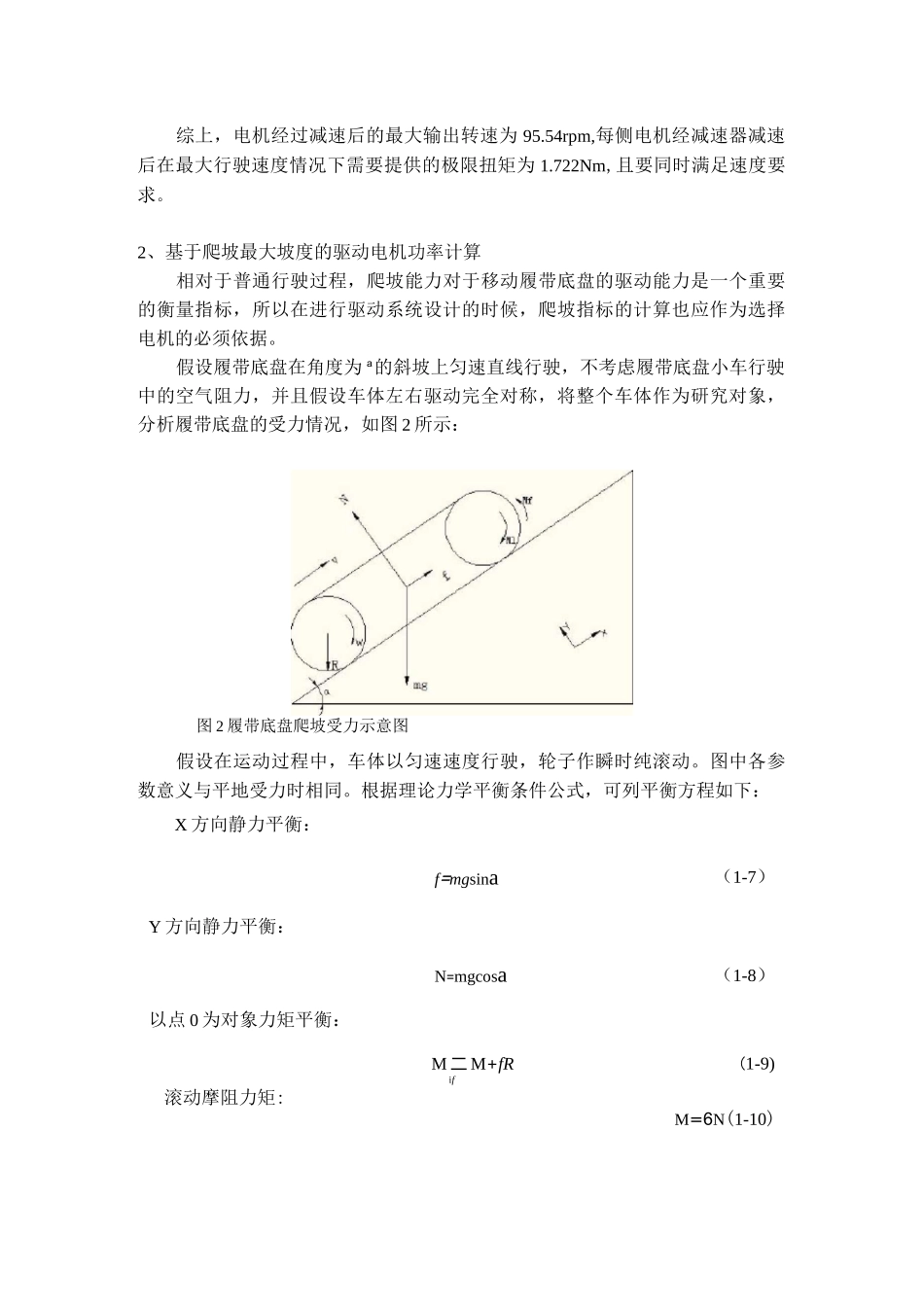
2m/s2驱动轮直径:200mm;爬坡角度:35°;履带底盘主履带驱动电机的选择1、基于平地最大速度的驱动电机功率计算在城市道路上行驶时,履带底盘受力较简单
进行简化计算,假设车体以最大速度 lm/s 直线行驶,不考虑履带底盘行驶中的空气阻力,则其受力情况,如图 1 所示:图 1 履带底盘平地行驶示意图假设在运动过程中,轮子作瞬时纯滚动
根据理论力学平衡条件,有平衡方程:X 方向受力平衡:ma+f=0Y 方向受力平衡:1-1-1-1-nmax=3
54r/min以 O 点为对象力矩平衡:fR+M+M 二 0lf滚动摩阻力矩:M=dNf式中:m 车体总重量(kg);a——车体运行加速度(m/s2);f——地面对履带底盘的摩擦阻力(N);N——地面对履带底盘的支撑力(N);R——驱动轮半径(m);Ml——作用于驱动轮的驱动力矩(Nm);Mf—驱动轮滚动摩阻力矩(Nm);3
—地面履带滚动摩阻系数,》=0
假设车体在 5 秒内达到最大速度 lm/s,则加速度:a二°・2m/s2联立上述方程:M 二 M+fR=0
007x40x9
8+40x0
544Nmlf同时,根据公式:v 二 Ro代入 v=1m/s,R=0
1m 的值,可求得主动轮角速度为 o=10rad/s
又根据要求的行驶最大速度 vmax=1m/s,_vx60n——maxmax兀 D由公式 1-6 初步确定电机经过减速后的最大输出转速1x60综上,电机经过减速后的最大输出转速为 95
54rpm,每侧电机经减速器减速后在最大行驶速度情况下需要提供的极限扭矩为 1
722Nm,