自动控制原理实验报告控制系统的根轨迹分析实验报告姓名::实验名称:线性定常系统的串联校正一、实验目的1.通过实验,理解所加校正装置的结构、特性和对系统性能的影响;2.掌握串联校正几种常用的设计方法和对系统的实时调试技术
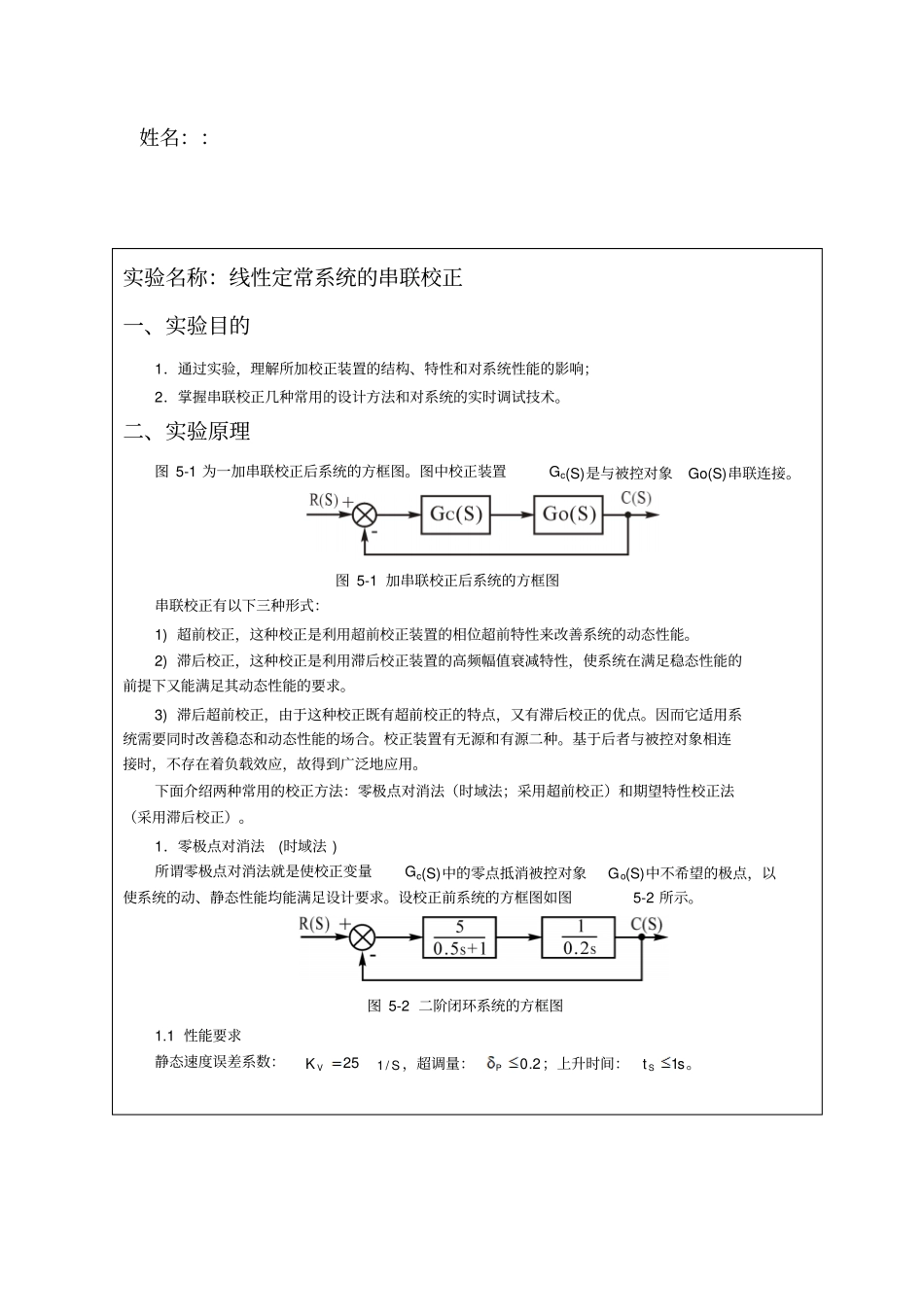
二、实验原理图 5-1 为一加串联校正后系统的方框图
图中校正装置Gc(S)是与被控对象Go(S)串联连接
图 5-1 加串联校正后系统的方框图串联校正有以下三种形式:1) 超前校正,这种校正是利用超前校正装置的相位超前特性来改善系统的动态性能
2) 滞后校正,这种校正是利用滞后校正装置的高频幅值衰减特性,使系统在满足稳态性能的前提下又能满足其动态性能的要求
3) 滞后超前校正,由于这种校正既有超前校正的特点,又有滞后校正的优点
因而它适用系统需要同时改善稳态和动态性能的场合
校正装置有无源和有源二种
基于后者与被控对象相连接时,不存在着负载效应,故得到广泛地应用
下面介绍两种常用的校正方法:零极点对消法(时域法;采用超前校正)和期望特性校正法(采用滞后校正)
1.零极点对消法(时域法 ) 所谓零极点对消法就是使校正变量Gc(S)中的零点抵消被控对象Go(S)中不希望的极点,以使系统的动、静态性能均能满足设计要求
设校正前系统的方框图如图5-2 所示
图 5-2 二阶闭环系统的方框图1
1 性能要求静态速度误差系数:25VKS/1,超调量:2
0P;上升时间:s1St
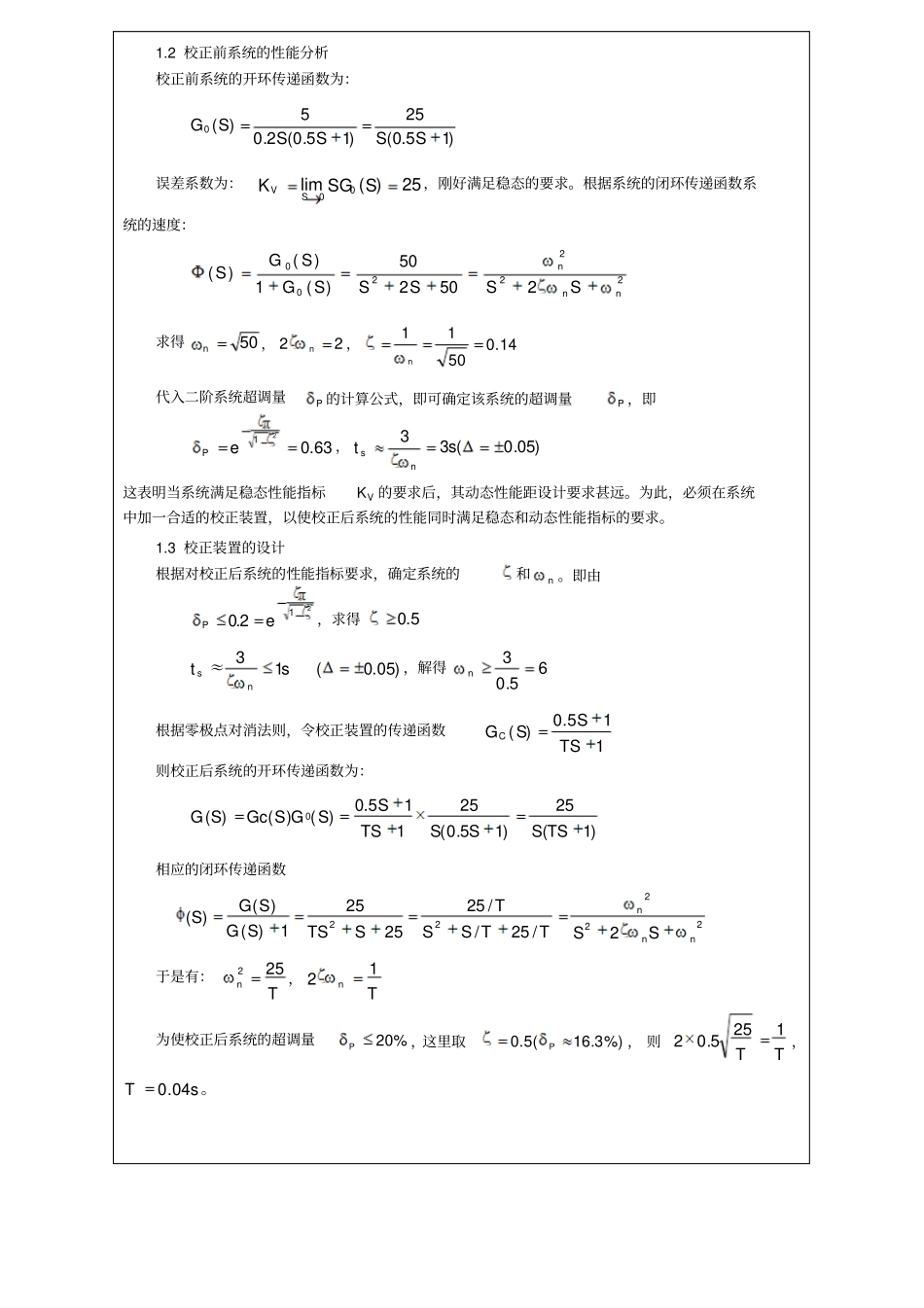
2 校正前系统的性能分析校正前系统的开环传递函数为:)15
0(25)15
05)(0SSSSSG误差系数为:25)(lim00SSGKSV,刚好满足稳态的要求
根据系统的闭环传递函数系统的速度:222200250250)(1)()(nnnSSSSSGSGS求得50n,22n,14
05011n代入二阶系统超调量P 的计算公式,即可确定该系统的超调量P ,即63
021eP,)05