Fronius 焊机与 ABB 机器人 DeviceNet 通讯配置(BK5250)1
开箱,检查 ABB 机器人各部件,确认无误后,按照Robot 说明把机器人接插件连接好
制作机器人电源线,如图3
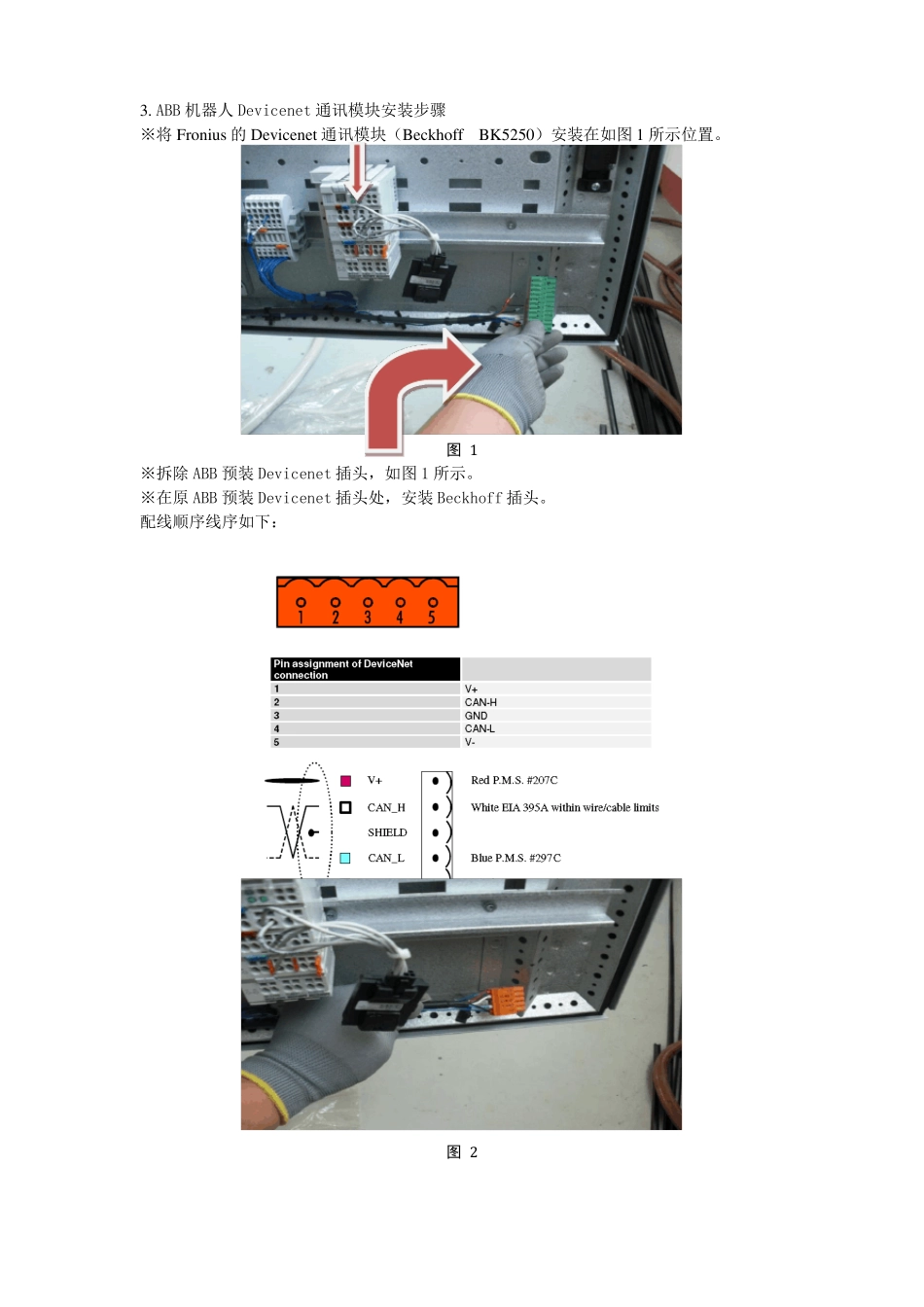
ABB 机器人 Devicenet 通讯模块安装步骤※将 Fronius 的 Devicenet 通讯模块(BeckhoffBK5250)安装在如图 1 所示位置
图 1※拆除 ABB 预装 Devicenet 插头,如图 1 所示
※在原 ABB 预装 Devicenet 插头处,安装 Beckhoff 插头
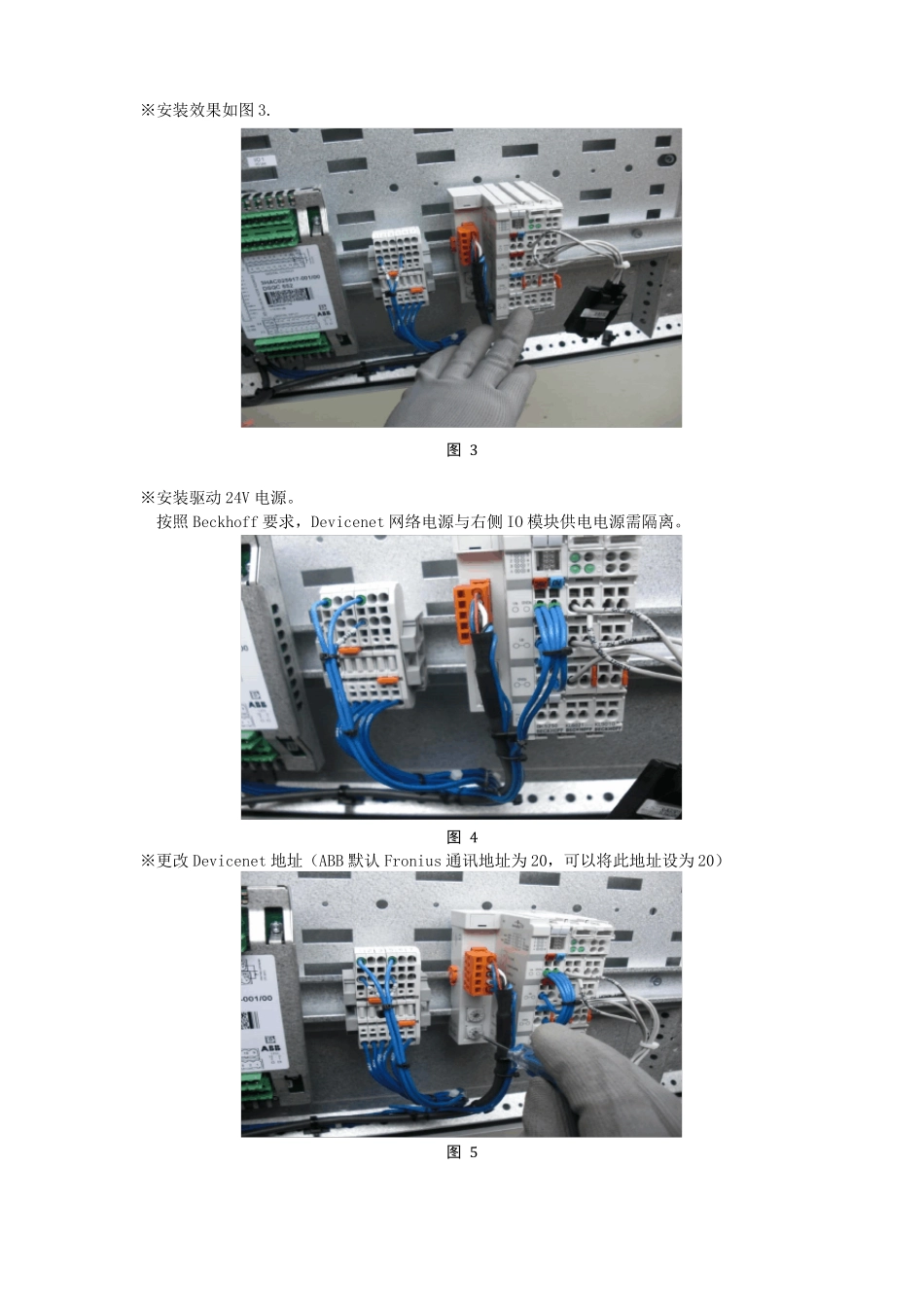
配线顺序线序如下:图 2※安装效果如图 3
图 3※安装驱动 24V 电源
按照 Beckhoff 要求,Devicenet 网络电源与右侧 IO 模块供电电源需隔离
图 4※更改 Devicenet 地址(ABB 默认 Fronius 通讯地址为 20,可以将此地址设为 20)图 5确认接线无误后,打开机器人控制柜左上角电源开关,机器人上电,等待数十秒后,机器人示教器进入主画面,默认语言为英文,此时可在路径 ABB
CONTROL PANEL
LANGUAGE中将语言修改为中文
※ABB 机器人试教器设置(已安装 Fronius 弧焊软件包)1
确认 BUS 参数内有 Devicenet1 选项(出厂已安装)路径:ABB
控制面板…配置系统参数…主题…I/O…BUS图 62
确认 Unit Type 参数内有 BK5250 选项路径:ABB
控制面板…配置系统参数…主题…I/O…Unit Type图 7如果没有 BK5250,则需新建
步骤如下:在 UnitType 下,点击“添加”,弹出框中修改如下图参数,修改完之后,单击确定键,提示重启,选择否
更改 iofronius1 参数◎Type of Unit BK5250(如图 8)◎De