1 24GHz汽车毫米波雷达实验报告 是德科技 射频应用工程师 王创业 1
前言 汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用
随着器件工艺和微波技术的发展,毫米波雷达产品越来越小
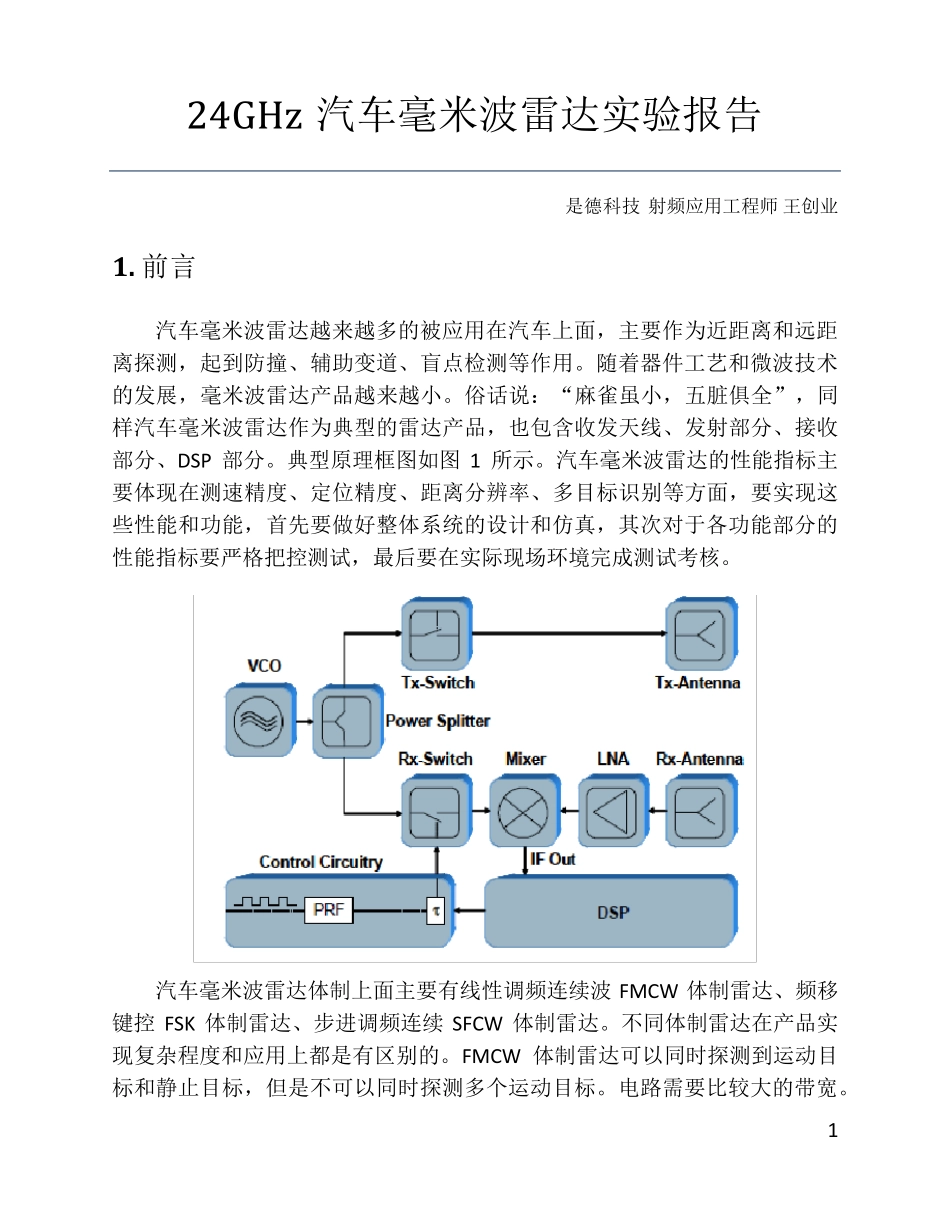
俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP 部分
典型原理框图如图 1 所示
汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核
汽车毫米波雷达体制上面主要有线性调频连续波FMCW 体制雷达、频移键控 FSK 体制雷达、步进调频连续 SFCW体制雷达
不同体制雷达在产品实现复杂程度和应用上都是有区别的
FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标
电路需要比较大的带宽
2 FSK 体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标
电路带宽比窄,系统响应捕获比较慢,成本比FMCW 体制要低很多
SFCW 体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来
SFCW 体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高
实验目的 在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计
主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上
典型的例子,在FMCW 雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与 FMCW 调制的线性度有关
利用是德科技平台化解决方案,即