0 、 进入指令调试的方法 1) 安装px4_toolchain_installer_v05_win
exe,这是编程与监控统一安装包
2) 使用USB 连接飞控,等待音乐完成,进入稳定状态
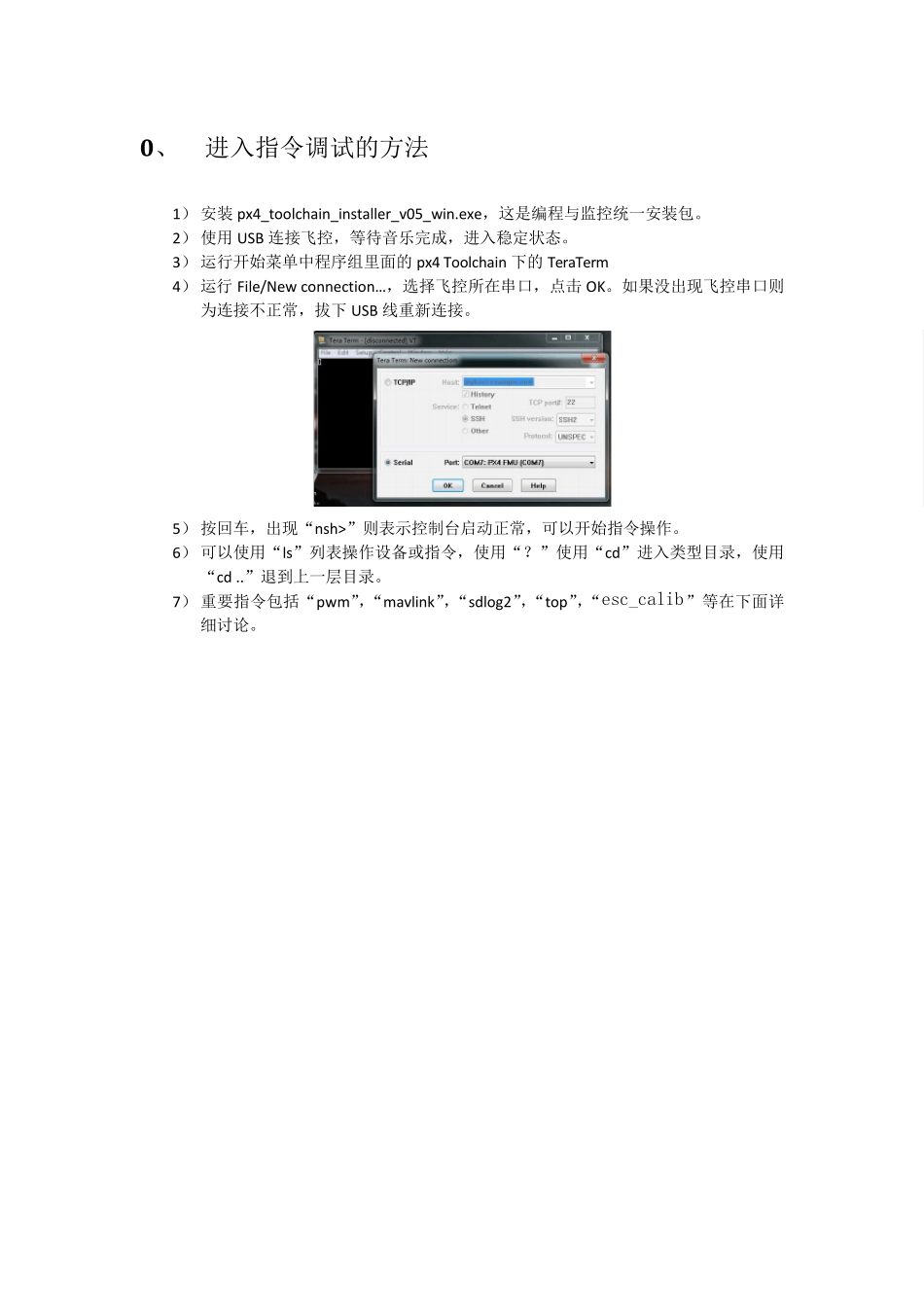
3) 运行开始菜单中程序组里面的px4 Toolchain 下的TeraTerm 4) 运行File/New connection… ,选择飞控所在串口,点击OK
如果没出现飞控串口则为连接不正常,拔下USB 线重新连接
5) 按回车,出现“nsh>”则表示控制台启动正常,可以开始指令操作
6) 可以使用“ls”列表操作设备或指令,使用“
”使用“cd”进入类型目录,使用“cd
”退到上一层目录
7) 重要指令包括“pwm”,“mavlink”,“sdlog2”,“top”,“esc_calib”等在下面详细讨论
1、控制台指令(List of on-board applications) 核心板载指令可以在系统启动的时候使用,其他指令可以在NuttShell 里面启动
使用help 指令来获得指令列表
运行top 或者ps 指令可以观察那些指令正在运行
指令可以放在指定的启动文件中,在飞控启动的时候自动调用
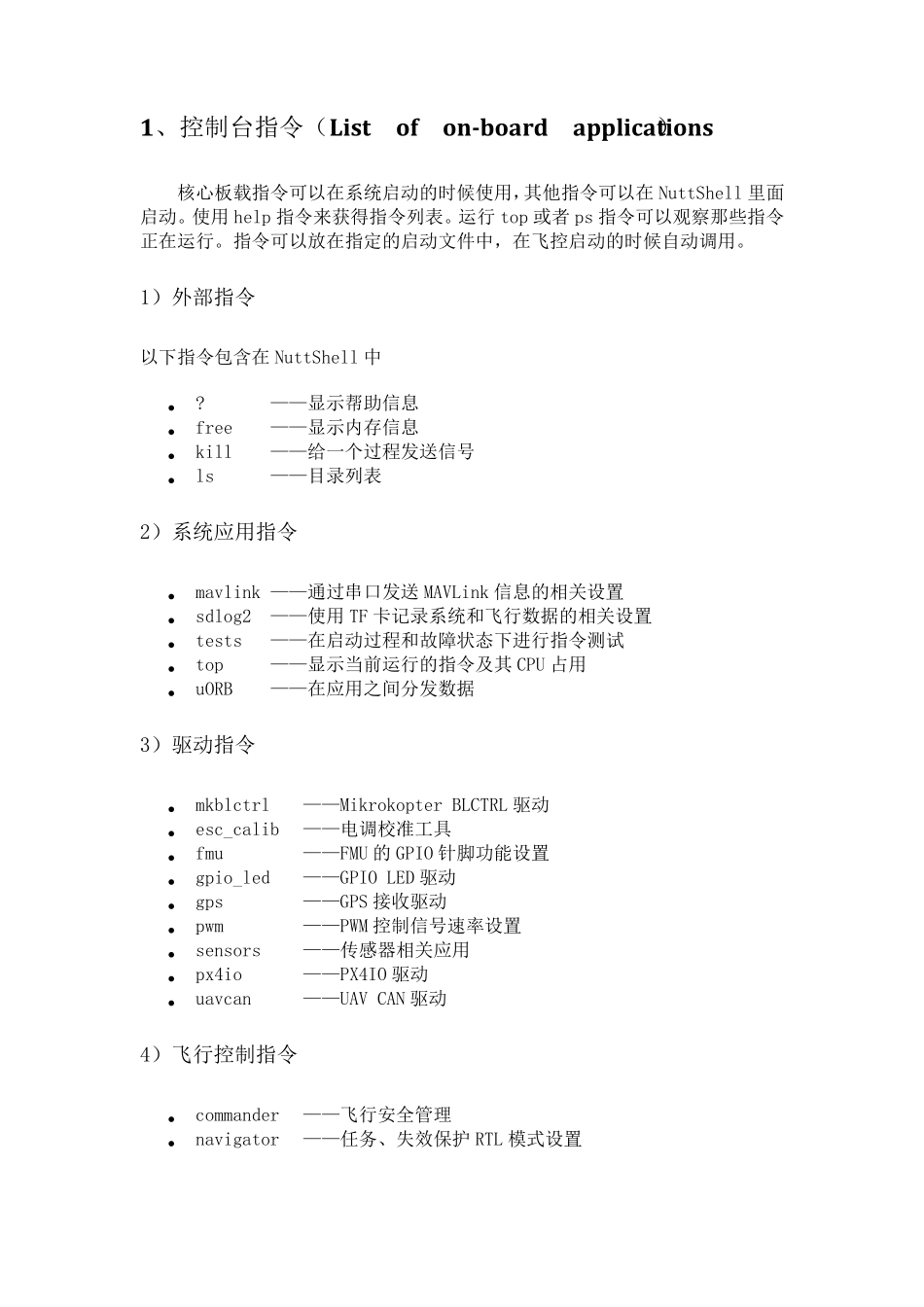
1)外部指令 以下指令包含在NuttShell 中
——显示帮助信息 free ——显示内存信息 kill ——给一个过程发送信号 ls ——目录列表 2)系统应用指令 mavlink ——通过串口发送 MAVLink 信息的相关设置 sdlog2 ——使用TF 卡记录系统和飞行数据的相关设置 tests ——在启动过程和故障状态下进行指令测试 top ——显示当前运行的指令及其CPU 占用 uORB ——在应用之间分发数据 3)驱动指令 mkblctrl ——Mikrokopter BLCTRL 驱动 esc_c