技术交流报告书 AGV 小车设计及应用 1
AGV 小车的发展背景 在现代化工业的发展中,提倡高效,快速,可靠,提倡将人从简单的工作中解放出来
机器人逐渐替代了人出现在各个工作岗位上
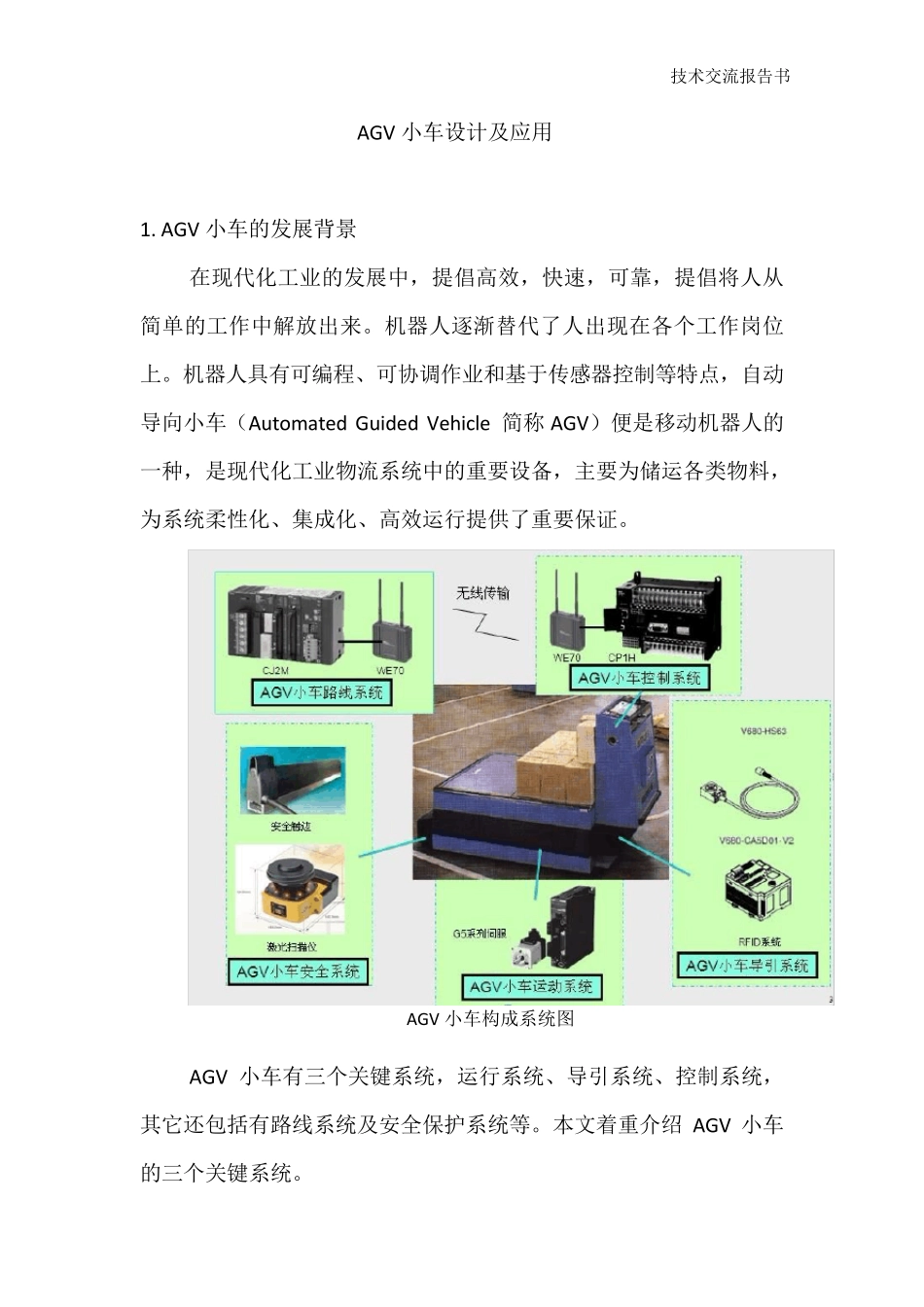
机器人具有可编程、可协调作业和基于传感器控制等特点,自动导向小车(Au tomated Gu ided Vehicle 简称 AGV)便是移动机器人的一种,是现代化工业物流系统中的重要设备,主要为储运各类物料,为系统柔性化、集成化、高效运行提供了重要保证
AGV 小车构成系统图 AGV 小车有三个关键系统,运行系统、导引系统、控制系统,其它还包括有路线系统及安全保护系统等
本文着重介绍 AGV 小车的三个关键系统
技术交流报告书 2
AGV 小车运行系统 AGV 小车运行系统是由车轮、减速器、制动器、电机及速度控制器等部分组成
AGV 小车常设计成三种运动方式:只能向前;能向前与向后;能纵向、横向、斜向及回转全方位运动
本次研究的 AGV小车是能够前进、后退及回转全方位运动
AGV 小车能够进行回转运动需要有转向装置
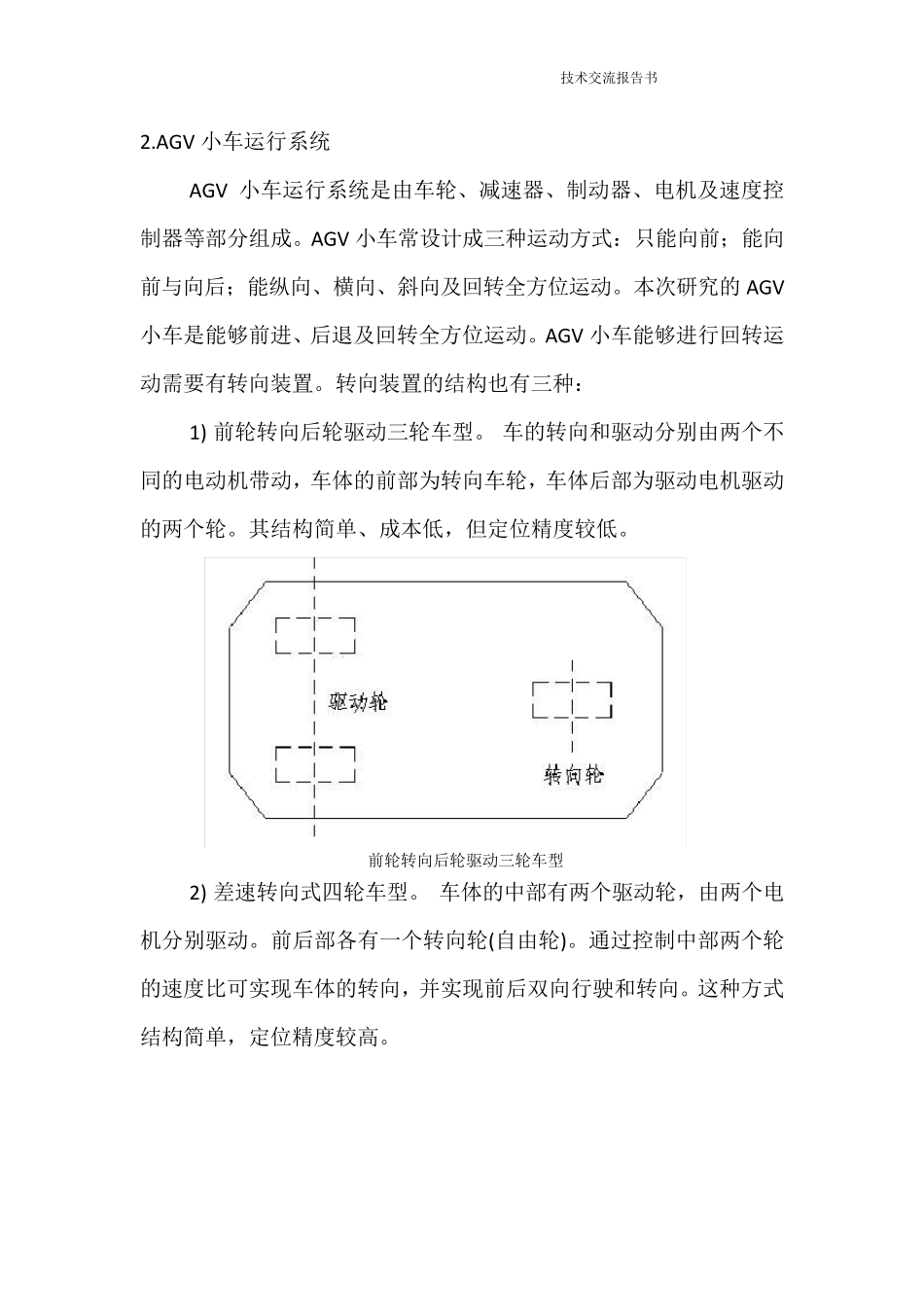
转向装置的结构也有三种: 1) 前轮转向后轮驱动三轮车型
车的转向和驱动分别由两个不同的电动机带动,车体的前部为转向车轮,车体后部为驱动电机驱动的两个轮
其结构简单、成本低,但定位精度较低
前轮转向后轮驱动三轮车型 2) 差速转向式四轮车型
车体的中部有两个驱动轮,由两个电机分别驱动
前后部各有一个转向轮(自由轮)
通过控制中部两个轮的速度比可实现车体的转向,并实现前后双向行驶和转向
这种方式结构简单,定位精度较高
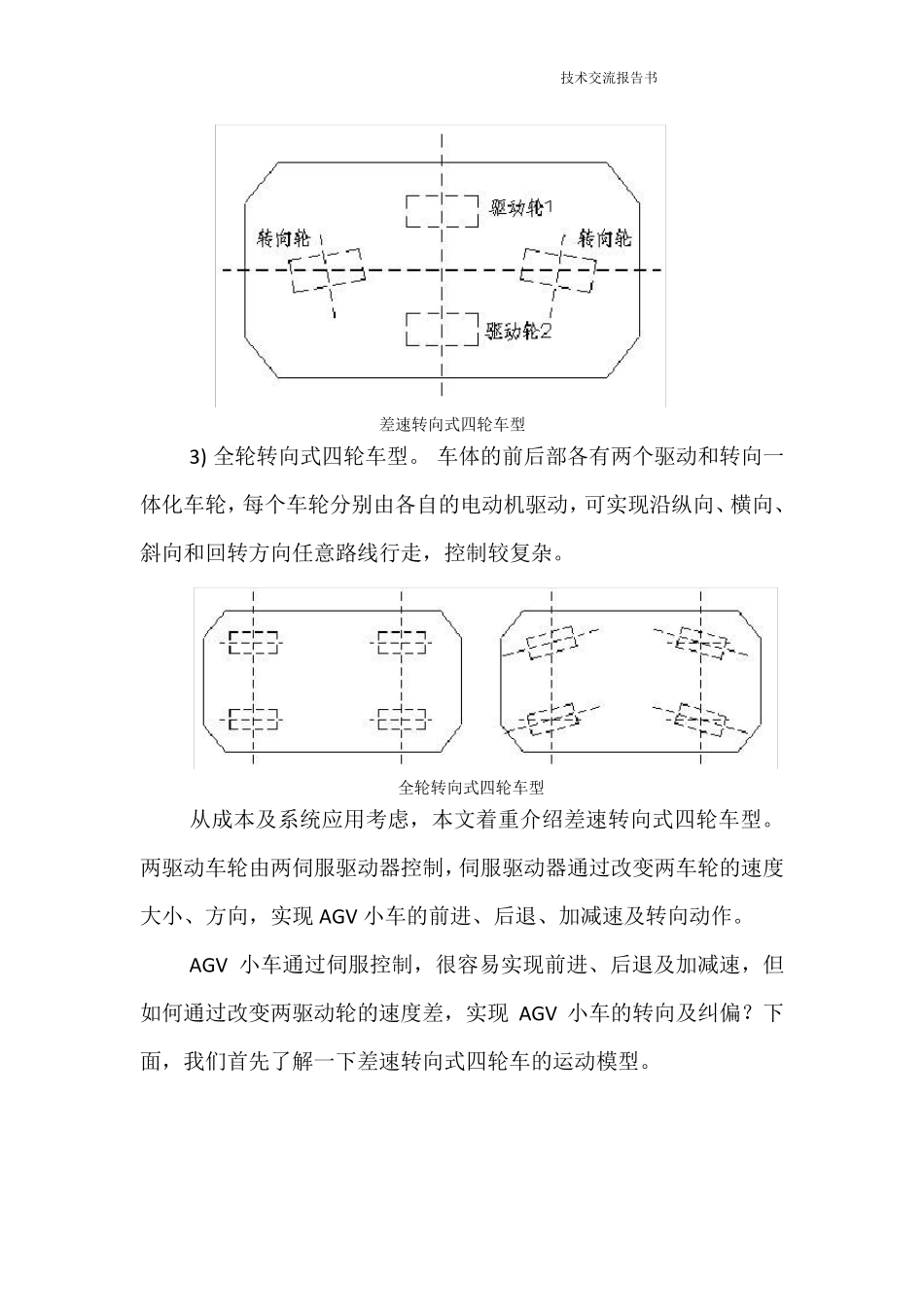
技术交流报告书 差速转向式四轮车型 3) 全轮转向式四轮车型
车体的前后部各有两个驱动和转向一体化车轮,每个车轮分别由各自的电动机驱动,可实现沿纵向、横向、斜向和回转方向任意路线行走,控制较复杂
全轮转向式四轮车型 从成本及系统应用考虑,本文着重介绍