1 CATIA dmu模块分析双横臂独立前悬架基础知识 使用dmu 模块,对初学者而言,关键问题是熟悉dmu 模块的各种操作;对于高级使用者而言,其关键在于分析机构是如何运动的
这里简介 CATIA dmu 模块中所需要的基本操作
表 1-1 运动副类型 图标 操作 是否加驱动 旋转副 1
先点击图标 2
先后点击两个零件选择的旋转轴线,如果是回转体零件,则 catia 可自动生成轴线;否则需要自己手动画一条直线 3
先后点击分属两个零件参考平面 可加 角度驱动 球铰 1
先点击图标 2
先后点击两个零件球铰铰接点 万向节 1
先点击图标 2
先后点击两条轴线,如果是回转体零件,则catia 可自动生成轴线;否则需要自己手动画一条直线 3
选择旋转形式,如绕第二根轴线转动 移动副 1
先点击图标 2
先后点击分属两个零件的两条直线,作为运动方向 3
先后点击分属两个零件的两个平面,作为运动平面 可加 直线驱动 点面副 1
先点击图标 2
先后选择分属不同零件的面和点,要求点在面上,有的书中现在assemble design 中装配,其实不必要,只要点的空间位置在面上即可
可加 固定 1
先点击图片 2
选择你要固定的零件 个人感觉,catia dmu 建立运动副,易于理解的想法就是,用几何元素固定这个运动形式,使两个相互运动的零件具有固定的运动形式,例如创建简单的移动副,要确定两个零件之间有个平移运动,那么需要知道两个零件的运动方向,而分属两个零件的两条直线(其实就是向量)就可以确定两个零件的运动方向了;然后,还需要知道零件在哪个平面内运动,这就需要分属两个零件的不同的参考面,这个面决定了零件的运动平面
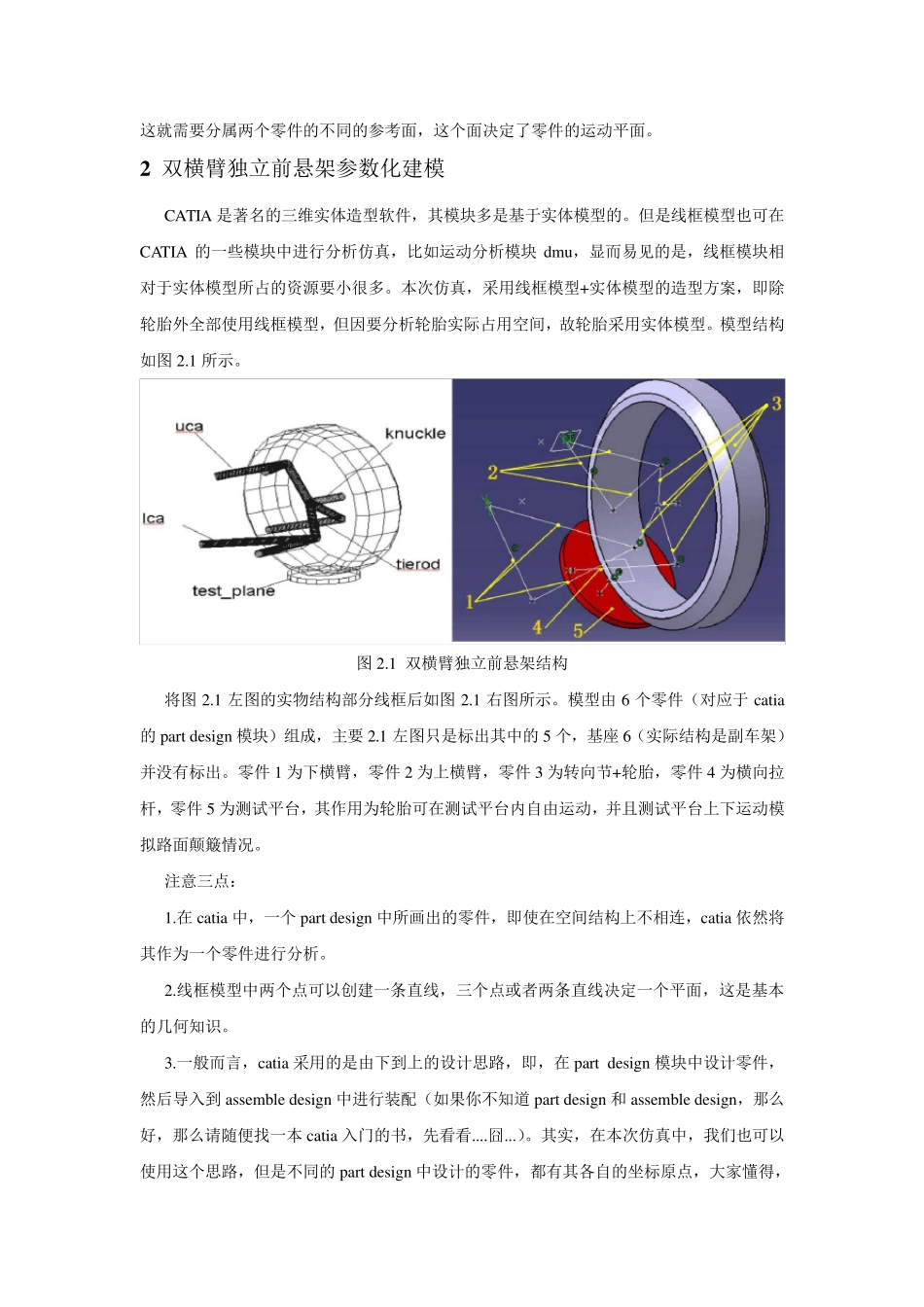
2 双横臂独立前悬架参数化建模 CATIA 是著名的三维实体造型软件,其模块多是基于实体模型的
但是线框模型也可在CATIA 的一些模块中进行分析仿真,比如运动分析