仿真之前的准备 将要仿真的模型所需的部件在装配模式下按照技术要求进行装配
装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真
运动仿真 通过“开始(S)”——“数字模拟”——“DMU Kinematics” 进入到运动仿真的模式下,开始进行仿真设置: (1) 先建立一个新机制(New Mechanism);命令在 “插入(I)”菜单下, (2) 对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标 按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint),刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条铰,缆绳铰,坐标系铰
各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍
(3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框 ,不用理它,在图形区选择要固定的零件即可
各种铰链设置合理,系统会自动提示: ,也就是说,机制可以仿真了
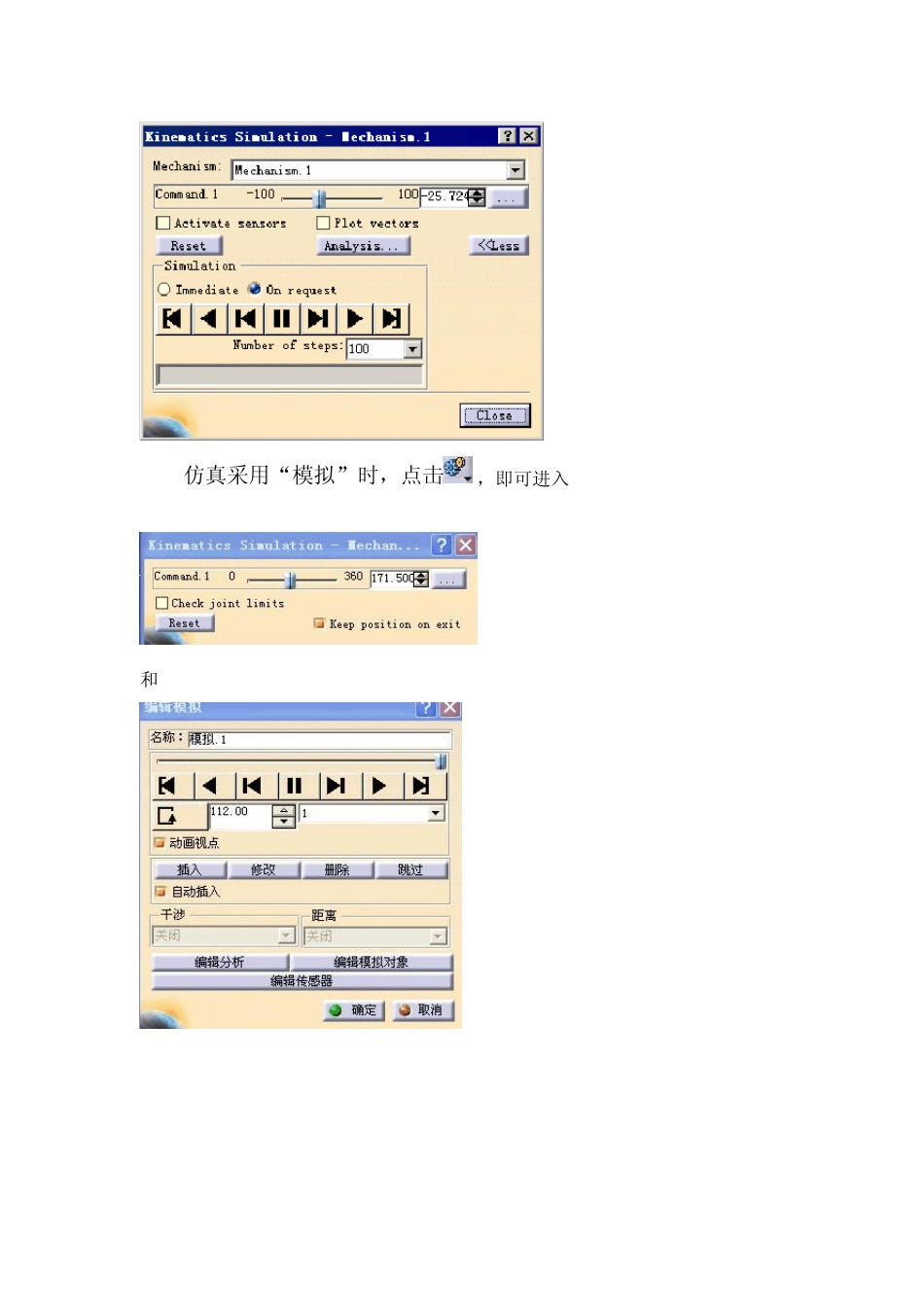
)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了
对话框示例如下 (b
)仿真采用“模拟”时,点击,即可进入 和 将动画视点和自动插入都选上后,用鼠标拖动command 后的命令块由大到小或由小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了 下面以齿轮运动仿真