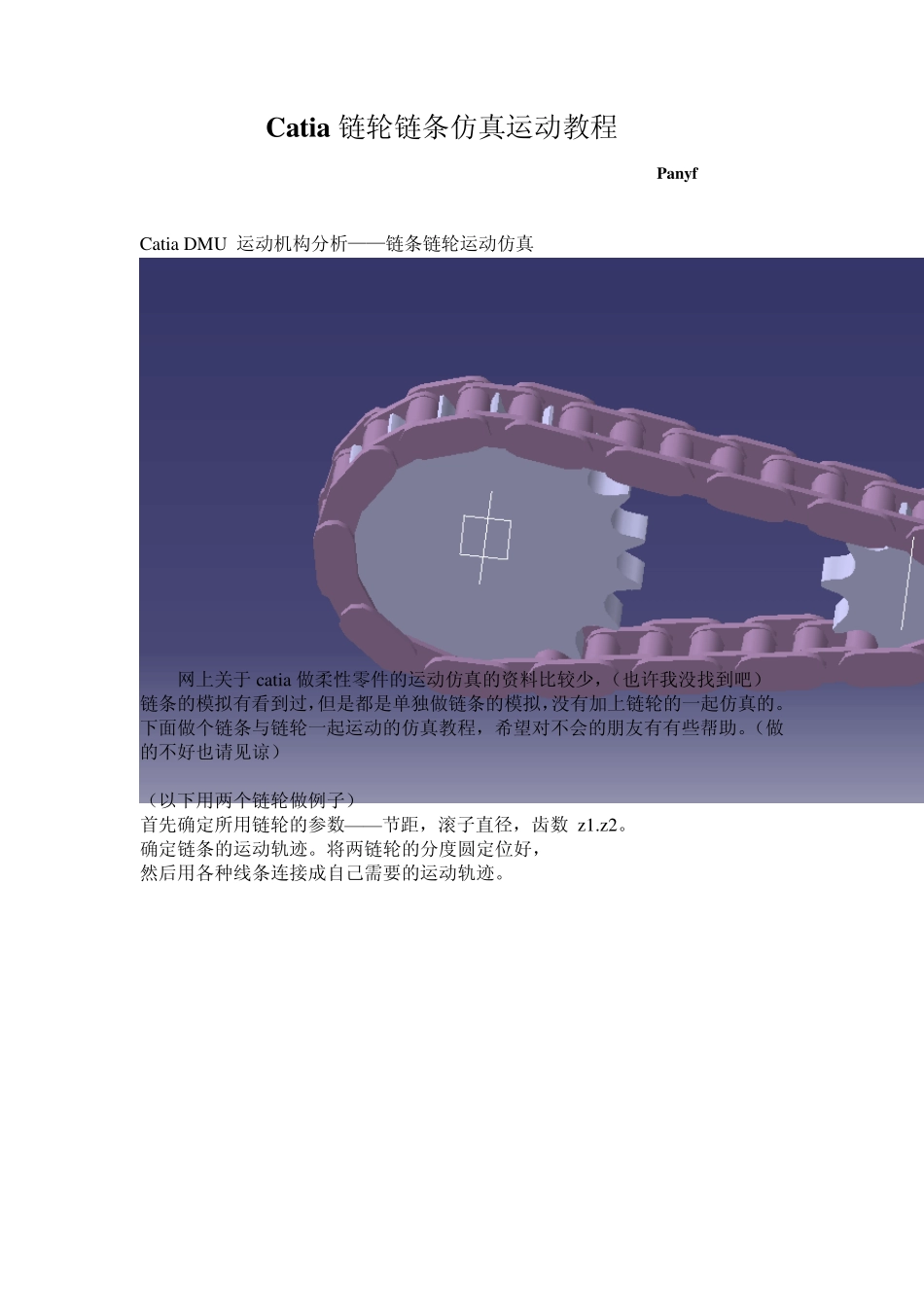
Catia 链轮链条仿真运动教程 Pany f Catia DMU 运动机构分析——链条链轮运动仿真 网上关于 catia 做柔性零件的运动仿真的资料比较少,(也许我没找到吧) 链条的模拟有看到过,但是都是单独做链条的模拟,没有加上链轮的一起仿真的
下面做个链条与链轮一起运动的仿真教程,希望对不会的朋友有有些帮助
(做的不好也请见谅) (以下用两个链轮做例子) 首先确定所用链轮的参数——节距,滚子直径,齿数 z 1
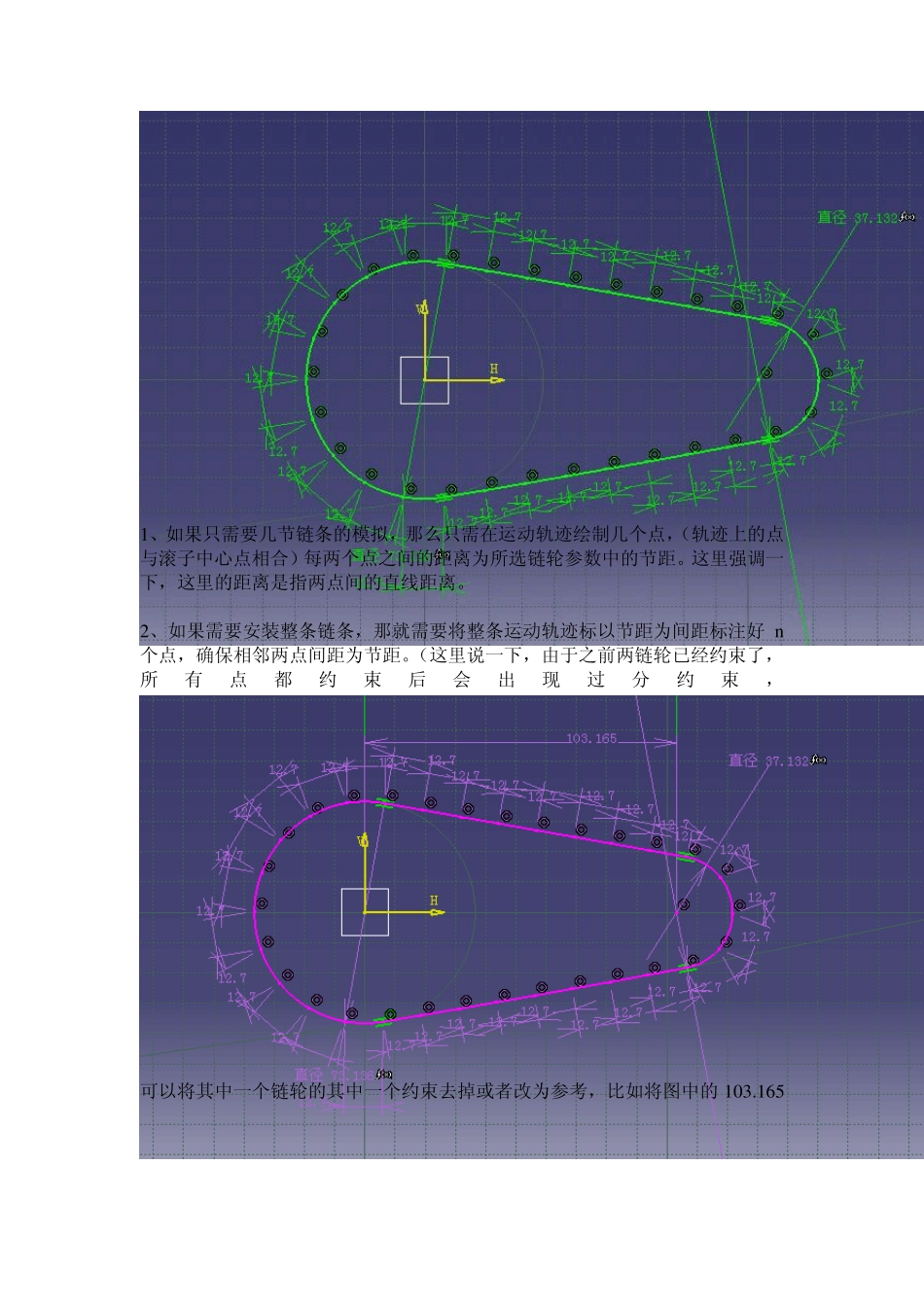
确定链条的运动轨迹
将两链轮的分度圆定位好, 然后用各种线条连接成自己需要的运动轨迹
1 、如果只需要几节链条的模拟,那么只需在运动轨迹绘制几个点,(轨迹上的点与滚子中心点相合)每两个点之间的距离为所选链轮参数中的节距
这里强调一下,这里的距离是指两点间的直线距离
2 、如果需要安装整条链条,那就需要将整条运动轨迹标以节距为间距标注好 n个点,确保相邻两点间距为节距
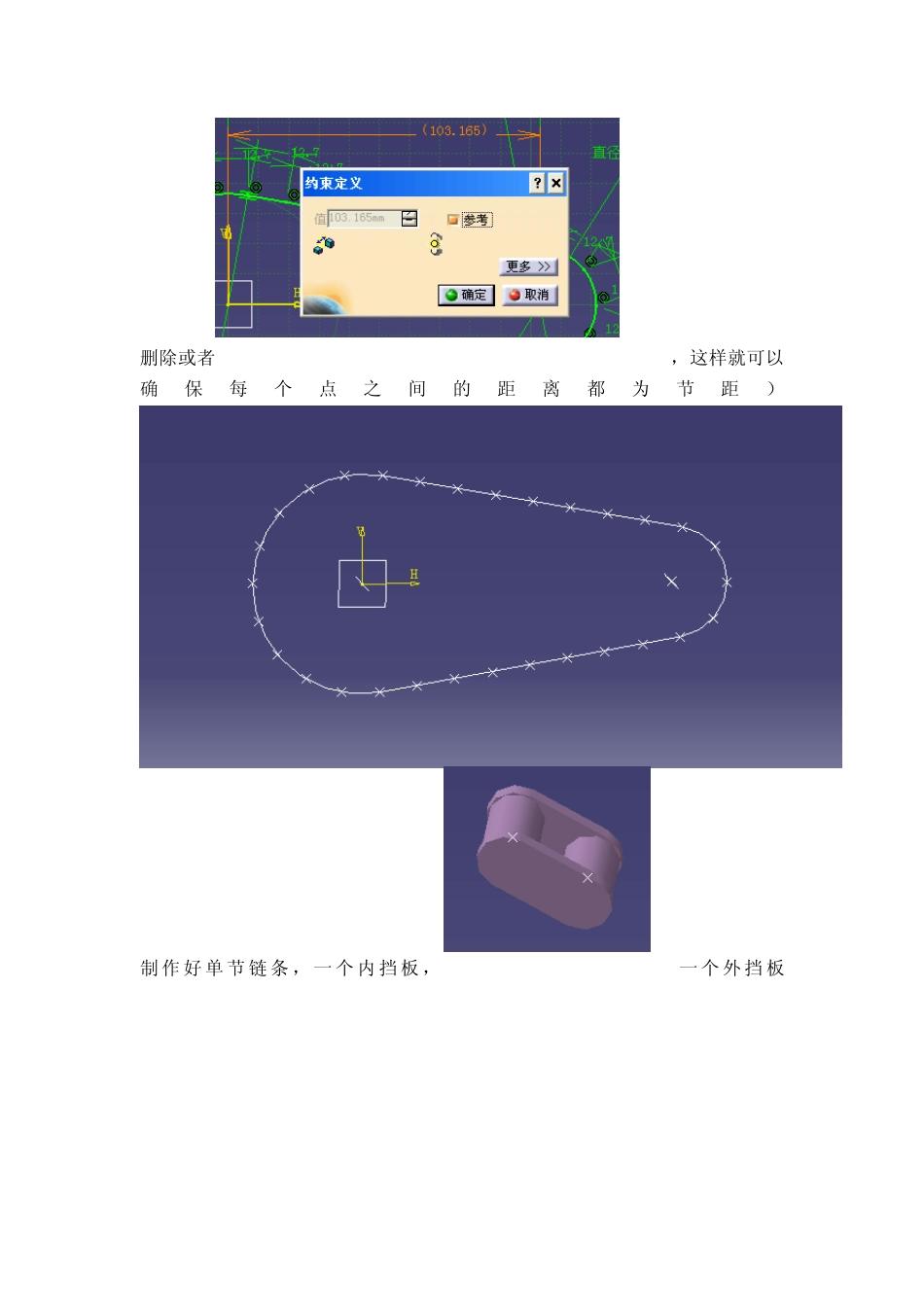
(这里说一下,由于之前两链轮已经约束了,所有点都约束后会出现过分约束,可以将其中一个链轮的其中一个约束去掉或者改为参考,比如将图中的 1 0 3
1 6 5删除或者,这样就可以确保每个点之间的距离都为节距) 制作好单节链条,一 个内 挡 板 ,一 个外 挡 板,两点为滚子中心,距离等于节距
(我做的比较简单,只是个样子,把滚子和内挡板做一块了) 进入装配设计,导入各个零件
将链条一内一外安装在轨迹上的点上,最后头尾相接
如图所示 这里提醒下,做链条模拟每个链节都是独立的,都要进行接合定义,举个例子,如果你的整个链条由 50 节链节(即 50 个滚子)组成,那么你就得定义 51 个点曲线接合,49 个旋转接合
选的越多接合越多,如果你电脑牛 X,那可以选多点,如果电脑一般,就尽量少点吧
进入 DMU 运动机构建立各种接合
首先选择固定件,把运动轨迹做为固定件