億亮科技 Vers ion: 1
0 主题内容 技术报告内容 [CKD 马达点位设定传送通讯说明] 1
CKD 马达外部输入信号(对应 PLC 的输出) 2
CKD 马达外部输出信号(对应 PLC 的输入) 3
常用参数的设置 4
程序编号选择说明 5
PLC 程序例子 6
CKD 内部程序说明 PUBLISHER 亿亮科技 AUTHOR CHECK ISSUE DATE 2 0 0 9 -1 0 -1 3 镇华新 MODIFIED DATE 億亮科技 Vers ion: 1
0 主题内容 1
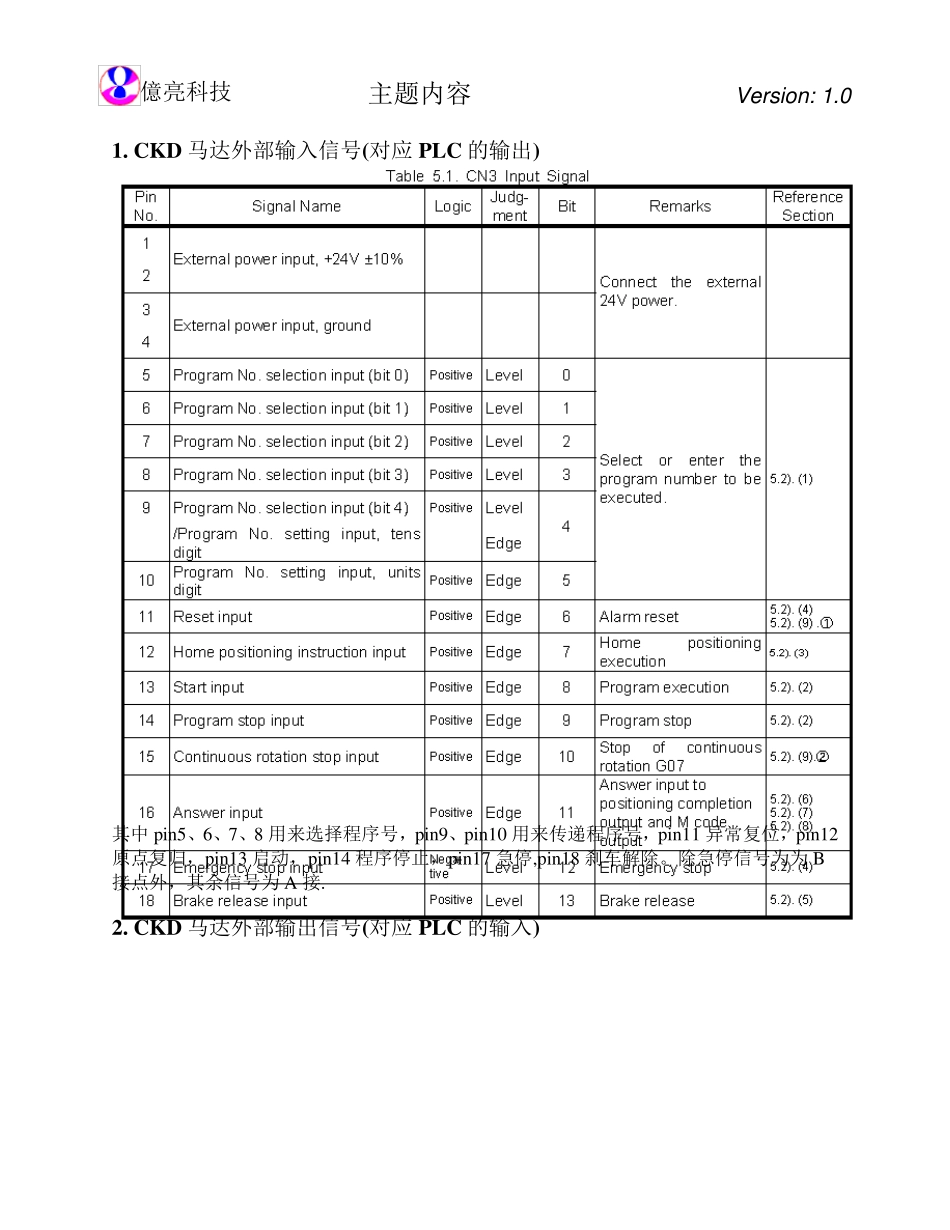
CKD 马达外部输入信号(对应PLC 的输出) 其中p in 5、6、7、8 用来选择程序号,p in 9、p in 10 用来传递程序号,p in 11 异常复位,p in 12原点复归,p in 13 启动,p in 14 程序停止,p in 17 急停,p in 18 刹车解除
除急停信号为为 B接点外,其余信号为 A 接
CKD 马达外部输出信号(对应PLC 的输入) 億亮科技 Vers ion: 1
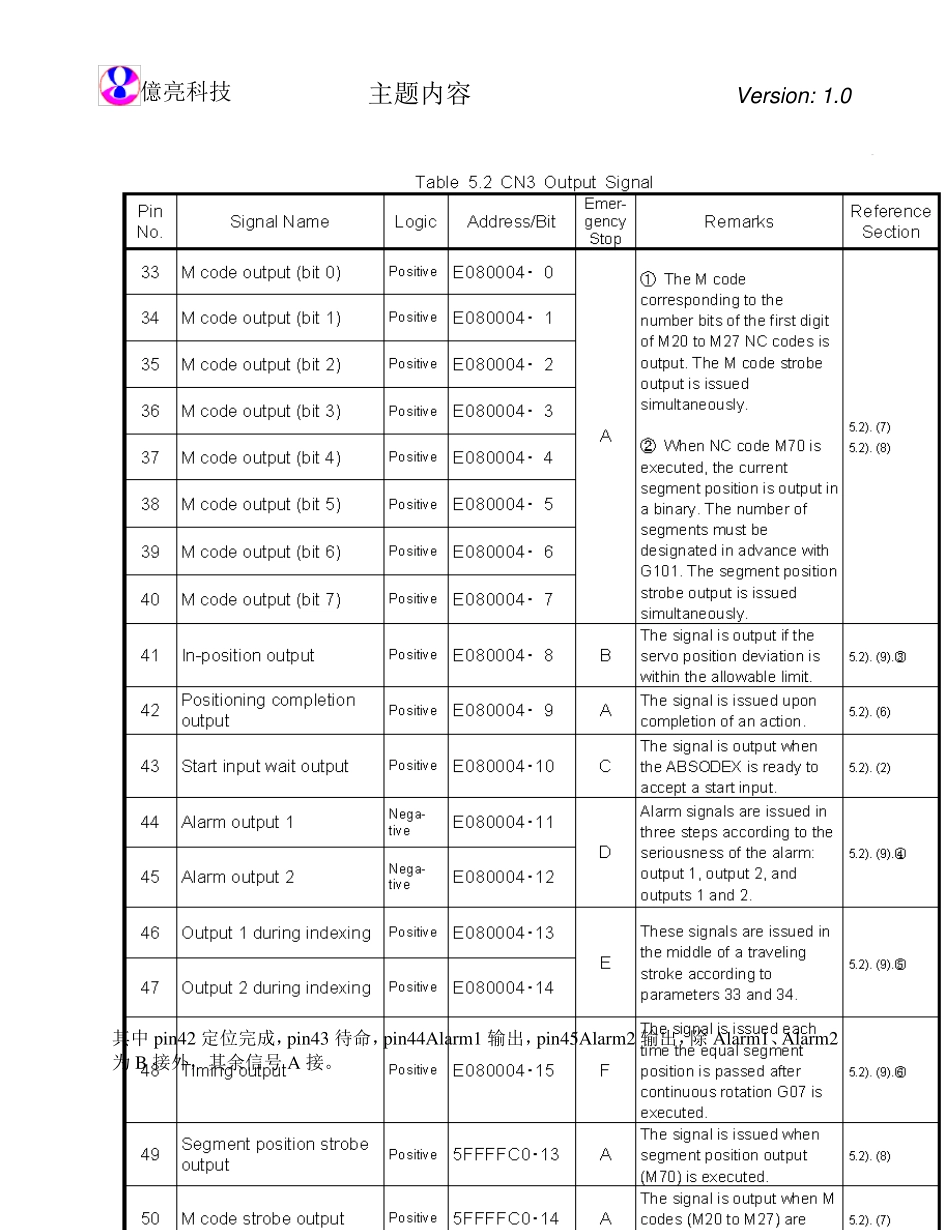
0 主题内容 其中pin42 定位完成,pin43 待命,pin44Alarm1 输出,pin45Alarm2 输出,除Alarm1、Alarm2为 B 接外,其余信号 A 接
億亮科技 Vers ion: 1
0 主题内容 3
常用参数的设置: NO 2 Acceleration and deceleration time of MC2 curve 设置加减速时间(秒),本例设置2,即加减速均为2 秒
NO 3 Home position offset amount 设置原点补正数量(pls),本例设置为43000,即补正数量为43000,将机台补正为最正的位置
NO 4 Home positioning direction 设置原点回归路径,本例设置