1 Copley 驱动器总结 一、 驱动器简介 Xenus 提供三种版本的驱动器 版本 支持的反馈类型 标准版本 正交编码器 -S 版 模拟正弦/余弦编码器 -R 版 无刷解析器 -S 和-R 版本可以从模拟正弦/余弦编码器和无刷解析器中模拟出正交编码器的输出信号,我们的驱动器是 XTL-230-40,输入标准版本,支持正交编码器
驱动器可以以以下几种方式进行操作: 1
作为一个传统的电机驱动器,接受外部控制器发出的电流,速度和位置信号
在电流和速度模式下,可以接受正负 10V 的模拟信号;占空比 50%的 PWM 波,或者 PWM/极性输入
在位置模式下,输入可以是从步进电机控制器发出的位置增量命令(以脉冲方向格式或者递增递减计数格式)或者是从主编码器输出的 A/B 正交指令
作为 CANopen网络的一个网点
作为 DeviceNET 网络的一个网点
作为一个独立的控制器运行虚拟机上的程序,或者通过 RS232 串口运行 ASCII 码格式的指令
电源: 型号 编码器类型 持续电流 峰值电流 电压 XTL-230-40 正交编码器 20A 40A 100-240V 交流电 频率 47-63HZ 另外还需要一个独立的+24V 电源给内部控制电路供电,这个电源跟主电源隔离开来
这个设计保证了主电源断开,+24v 电源不断开的时候,驱动器能保留位置信息和通信
CME2 CME2 是对驱动器进行配置和调试的软件,通过 RS232 串口连接电脑和驱动器
所有的配置驱动器的操作都可以通过这个软件完 成
电机数据 存 储 为
CCM 文 件,驱动器数据 存 储 为
CCX文 件
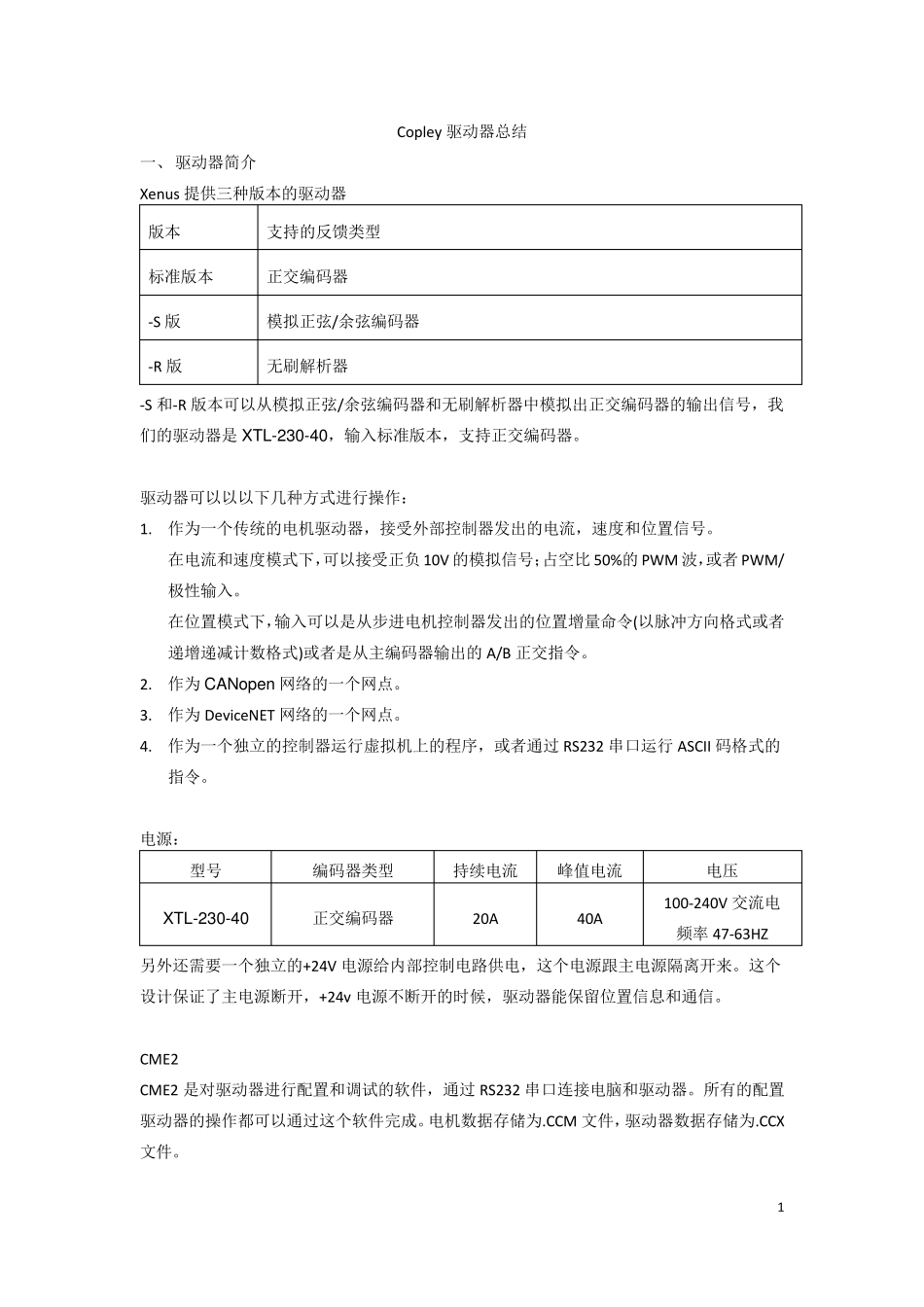
2 二、 驱动器操作 供电和接地图 电源 交流电压经过整流滤波输出直流驱动 PW M 逆变器
+24V 电源经过一个 DC/DC 变换器,产生控制电路所需的电压和一个