FANUC 机器人操作说明书下载后可任意编辑1. 概要 ………………………………………………………………… 32. 坐标系 ……………………………………………………………
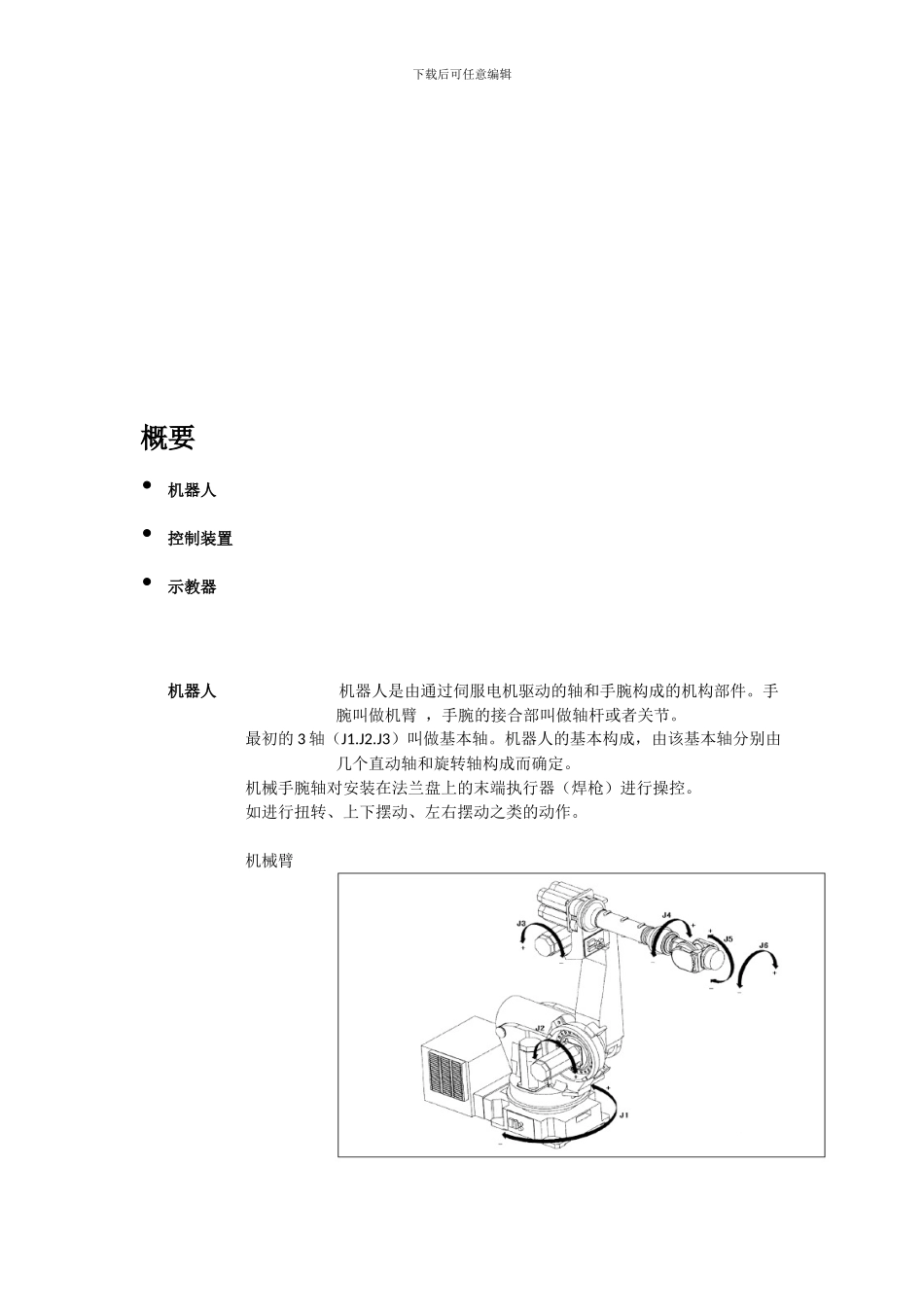
73. 程序创建 ………………………………………………………… 114. 动作指令 ………………………………………………………… 125. 焊接指令 ………………………………………………………… 166. 摆动指令 ………………………………………………………… 187. 寻点指令 ………………………………………………………… 20下载后可任意编辑概要•机器人•控制装置•示教器机器人 机器人是由通过伺服电机驱动的轴和手腕构成的机构部件
手腕叫做机臂 ,手腕的接合部叫做轴杆或者关节
最初的 3 轴(J1
J3)叫做基本轴
机器人的基本构成,由该基本轴分别由几个直动轴和旋转轴构成而确定
机械手腕轴对安装在法兰盘上的末端执行器(焊枪)进行操控
如进行扭转、上下摆动、左右摆动之类的动作
机械臂下载后可任意编辑控制装置 机器人控制装置,由电源装置、用户接口电路、动作控制电路、存储电路、I/O 电路等构成
用户在进行控制装置的操作时,使用示教操作盘和操作箱
动作控制电路通过主 cpu 印刷电路板,对用来操作包含附加轴在内的机器人的所有轴之伺服放大器进行控制
示教操作盘下载后可任意编辑与菜单相关的键控开关下载后可任意编辑与 JOG 相关的键控开关下载后可任意编辑与执行相关的键控开关与编辑相关的键控开关2
坐标系下载后可任意编辑 坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统
坐标系有关节坐标系、关节坐标系 关节坐标系是设定在机器人的关节中的坐标系
关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定
下图中的关节坐标系的关节值,处在所有轴都为 0°的