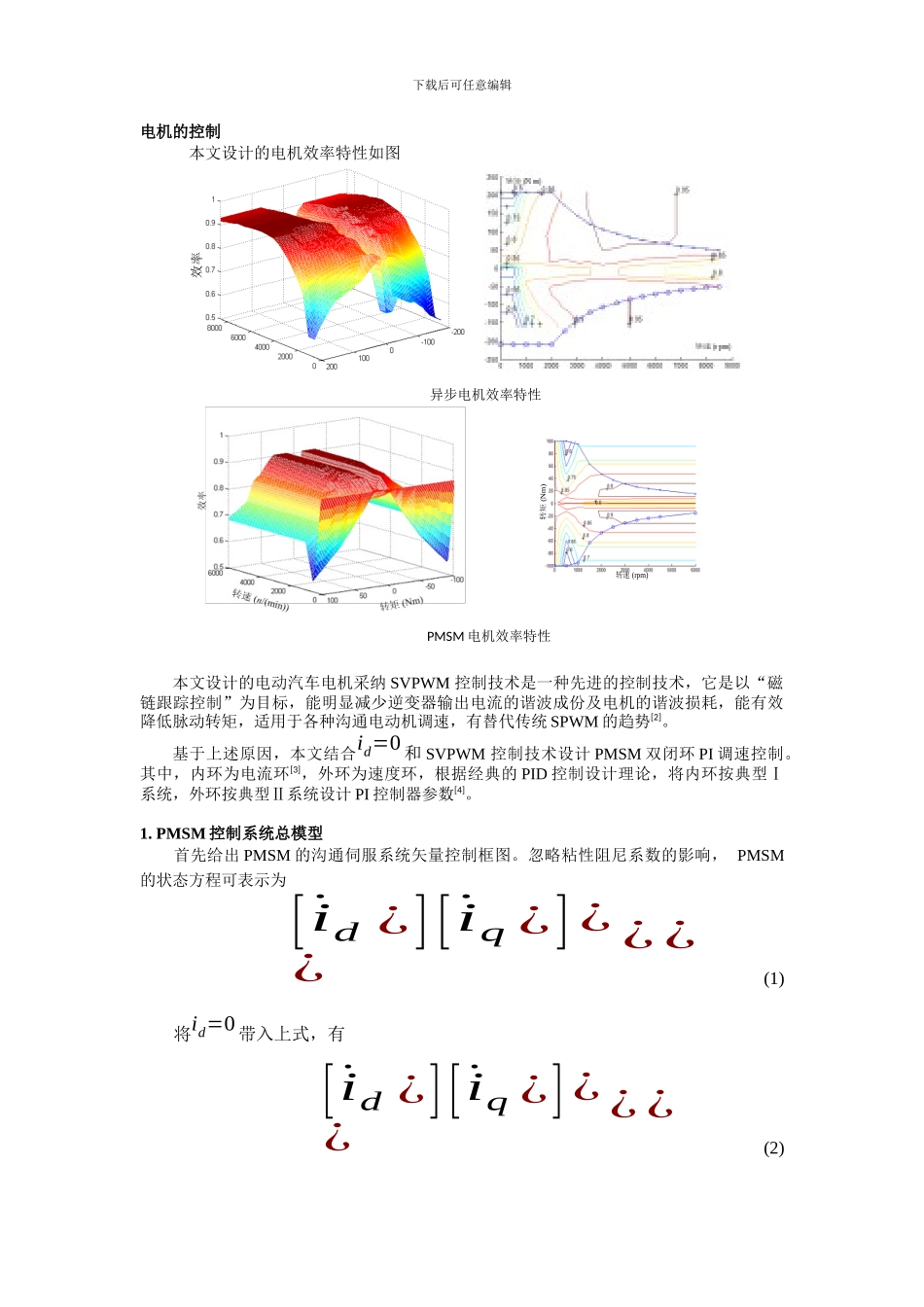
下载后可任意编辑电机的控制本文设计的电机效率特性如图效率 异步电机效率特性 转速 (rpm)转矩 (Nm)PMSM 电机效率特性本文设计的电动汽车电机采纳 SVPWM 控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种沟通电动机调速,有替代传统 SPWM 的趋势[2]
基于上述原因,本文结合id=0 和 SVPWM 控制技术设计 PMSM 双闭环 PI 调速控制
其中,内环为电流环[3],外环为速度环,根据经典的 PID 控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计 PI 控制器参数[4]
PMSM 控制系统总模型首先给出 PMSM 的沟通伺服系统矢量控制框图
忽略粘性阻尼系数的影响, PMSM 的状态方程可表示为[˙id ¿] [˙iq ¿] ¿¿¿ ¿ (1)将id=0 带入上式,有[˙id ¿] [˙iq ¿] ¿¿¿ ¿ (2)下载后可任意编辑式(1)、 (2)中,id 是直轴电流,iq 是交轴电流,ωm是转速
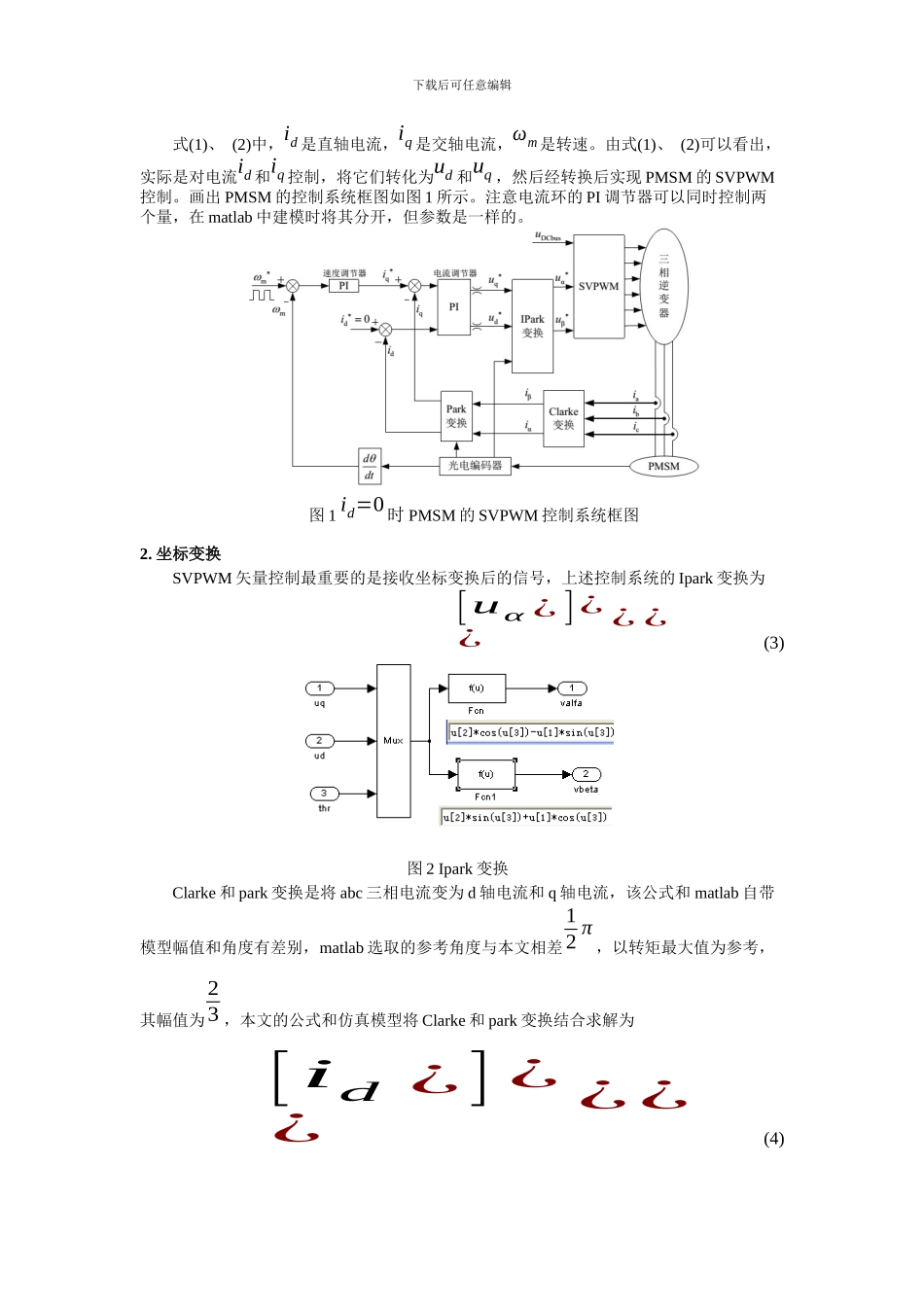
由式(1)、 (2)可以看出,实际是对电流id 和iq 控制,将它们转化为ud 和uq ,然后经转换后实现 PMSM 的 SVPWM 控制
画出 PMSM 的控制系统框图如图 1 所示
注意电流环的 PI 调节器可以同时控制两个量,在 matlab 中建模时将其分开,但参数是一样的
图 1 id=0 时 PMSM 的 SVPWM 控制系统框图2
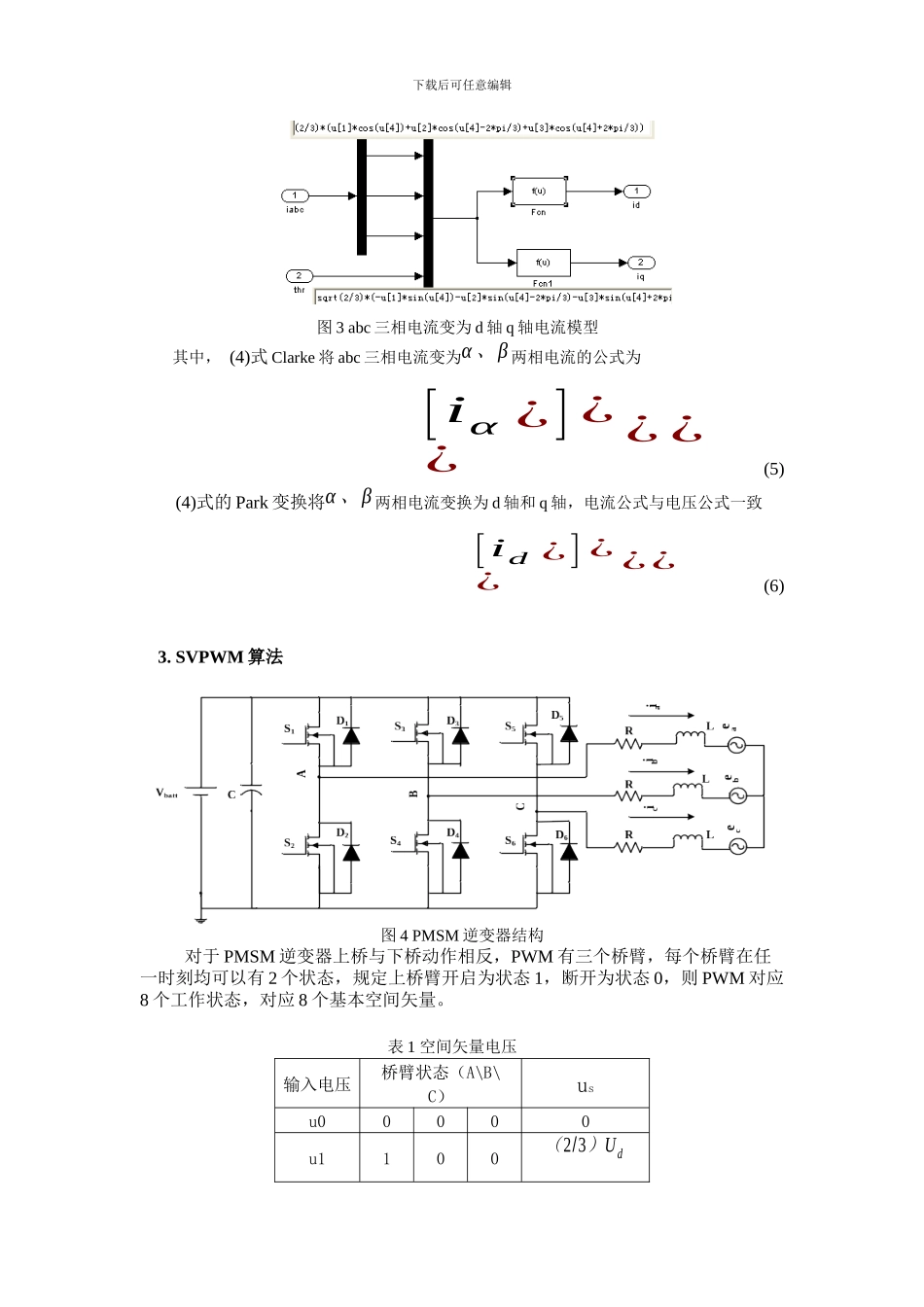
坐标变换SVPWM 矢量控制最重要的是接收坐标变换后的信号,上述控制系统的 Ipark 变换为 [uα ¿ ]¿¿¿ ¿ (3)图 2 Ipark 变换Clarke 和 park 变换是将 abc 三相电流变为 d 轴电流和 q 轴电流,该公式和 matlab 自带模型幅值和角度有差别,matlab 选取的参