1 / 22 上汽集团 临港机器人视觉系统 iRVision 操作手册 上海诣谱自动化装备有限公司 iRVision 操作小结 2 / 22 1. iRVision 概述 1.1 Offset 补偿和检测方式 根据iRVision 的补偿和测量方式的不同,iRVision 可作以下分类:对具体的应用,理解不同iRVision 的特性并选择一个适合的应用是非常重要的
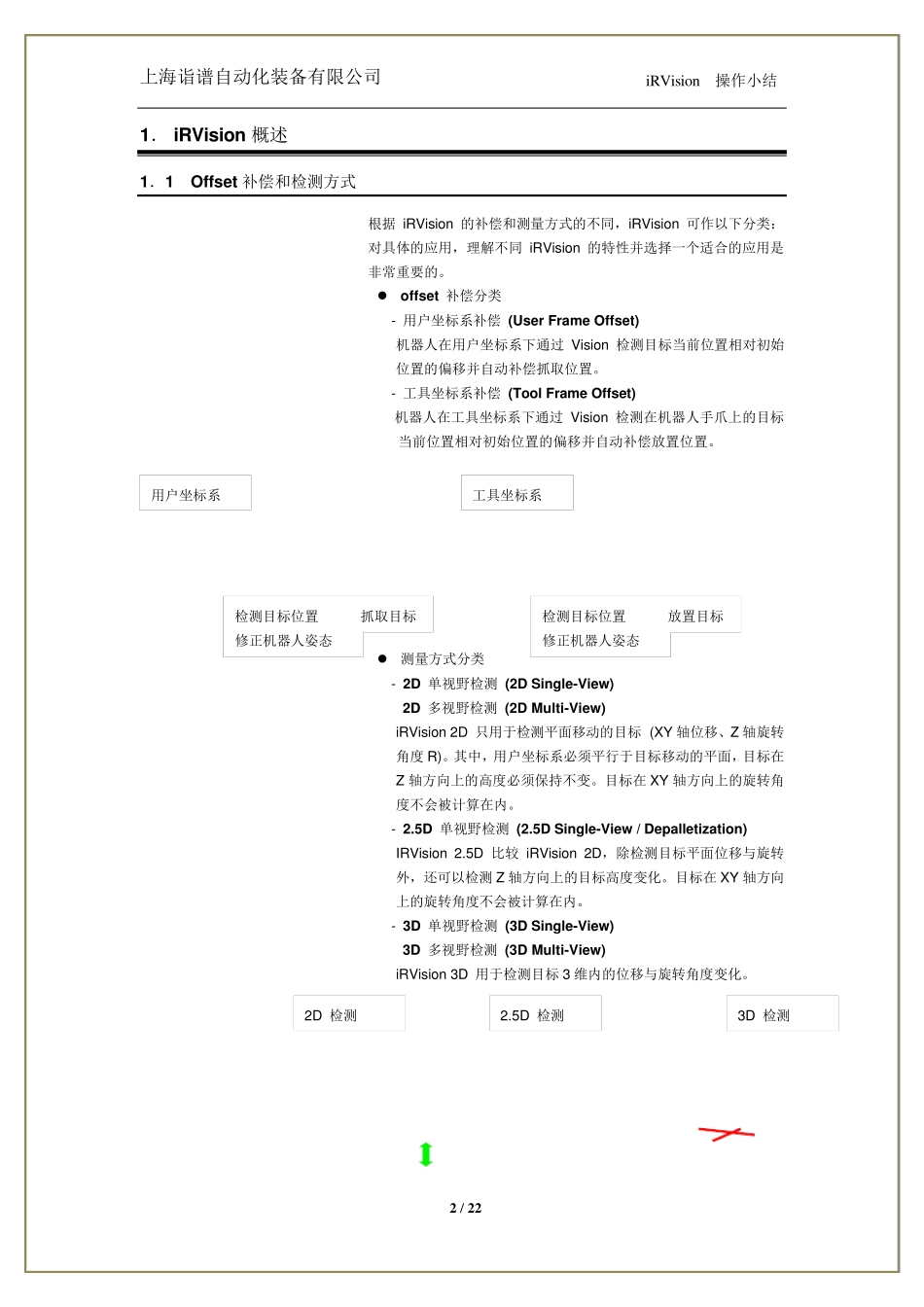
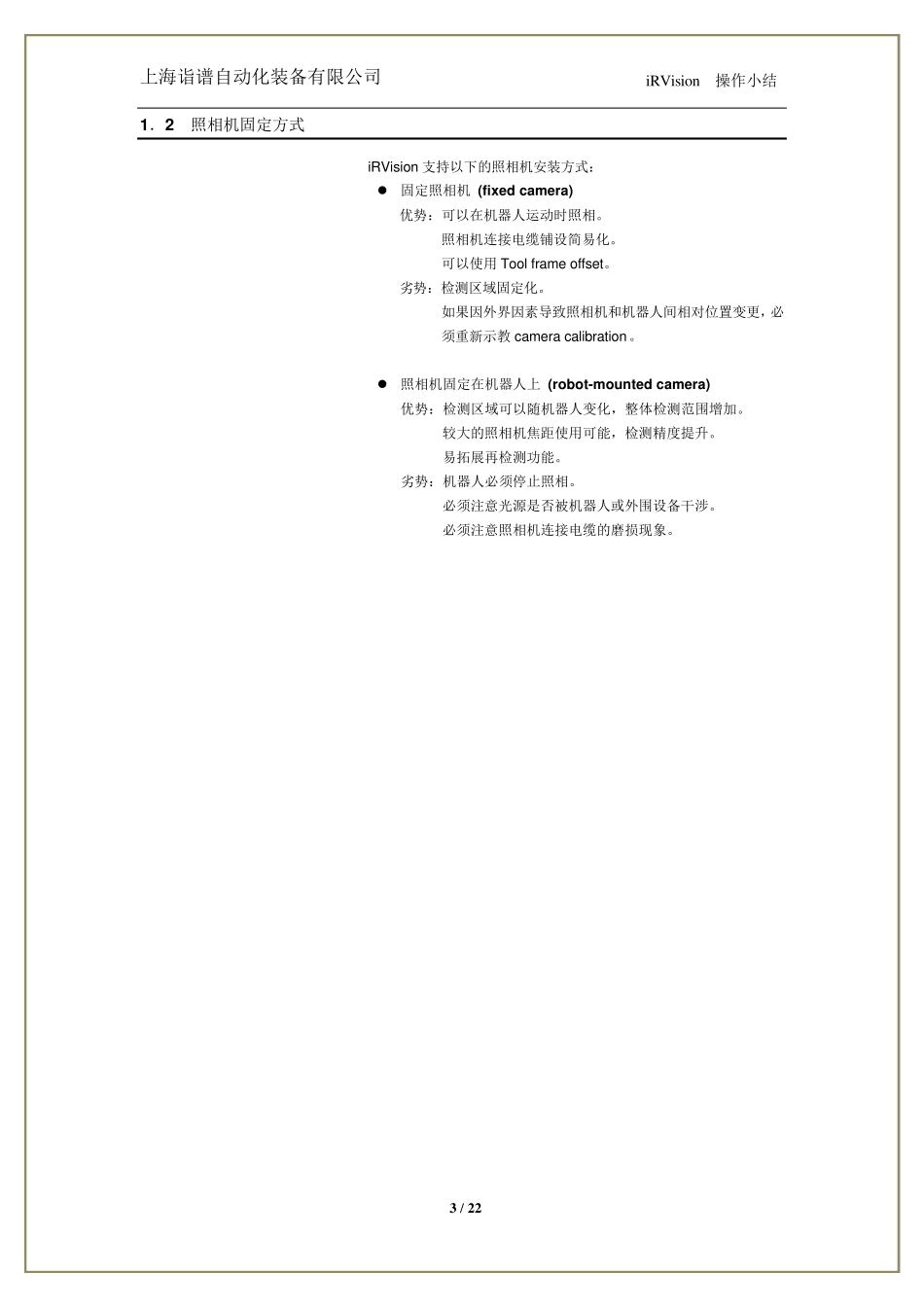
offset 补偿分类 - 用户坐标系补偿 (User Frame Offset) 机器人在用户坐标系下通过Vision 检测目标当前位置相对初始位置的偏移并自动补偿抓取位置
- 工具坐标系补偿 (Tool Frame Offset) 机器人在工具坐标系下通过Vision 检测在机器人手爪上的目标当前位置相对初始位置的偏移并自动补偿放置位置
测量方式分类 - 2D 单视野检测 (2D Single-View) 2D 多视野检测 (2D Multi-View) iRVision 2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度 R)
其中,用户坐标系必须平行于目标移动的平面,目标在Z 轴方向上的高度必须保持不变
目标在XY 轴方向上的旋转角度不会被计算在内
5D 单视野检测 (2
5D Single-View / Depalletization) IRVision 2
5D 比较 iRVision 2D,除检测目标平面位移与旋转外,还可以检测Z 轴方向上的目标高度变化
目标在XY 轴方向上的旋转角度不会被计算在内
- 3D 单视野检测 (3D Single-View) 3D 多视野检测 (3D Multi-View) iRVision 3D 用于检测目标3 维内的位移与旋转角度变化
检测目标位置 修正机器人姿态 放置目标 检测目标位置 修正机器人姿态 抓取目标 用户坐标系