Fanuc 机器人IO 配置和UI/UO 配置 说明:这几天直接跳转发送Fanuc 部分内容知识,以供大家阅读借鉴
这里主要给大家分享Fanuc 机器人的IO 分类以及CRMA15、CRMA16 的IO 分配,UI/UO 的分配
一、Fanuc 机器人IO 种类 1、Fanuc 机器人IO 分类 I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号
有通用 I/O 和专用 I/O
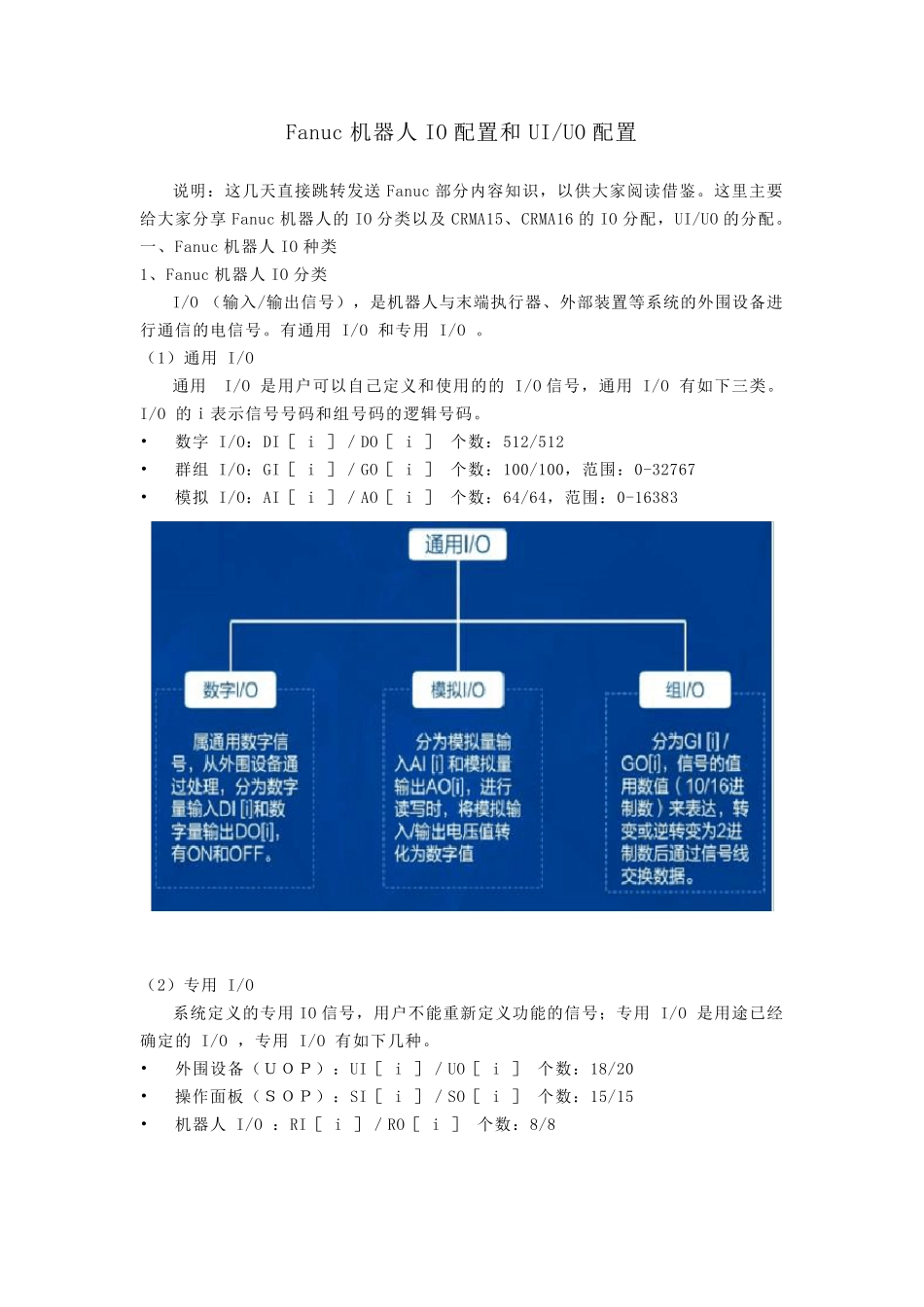
(1)通用 I/O 通用 I/O 是用户可以自己定义和使用的的 I/O 信号,通用 I/O 有如下三类
I/O 的i表示信号号码和组号码的逻辑号码
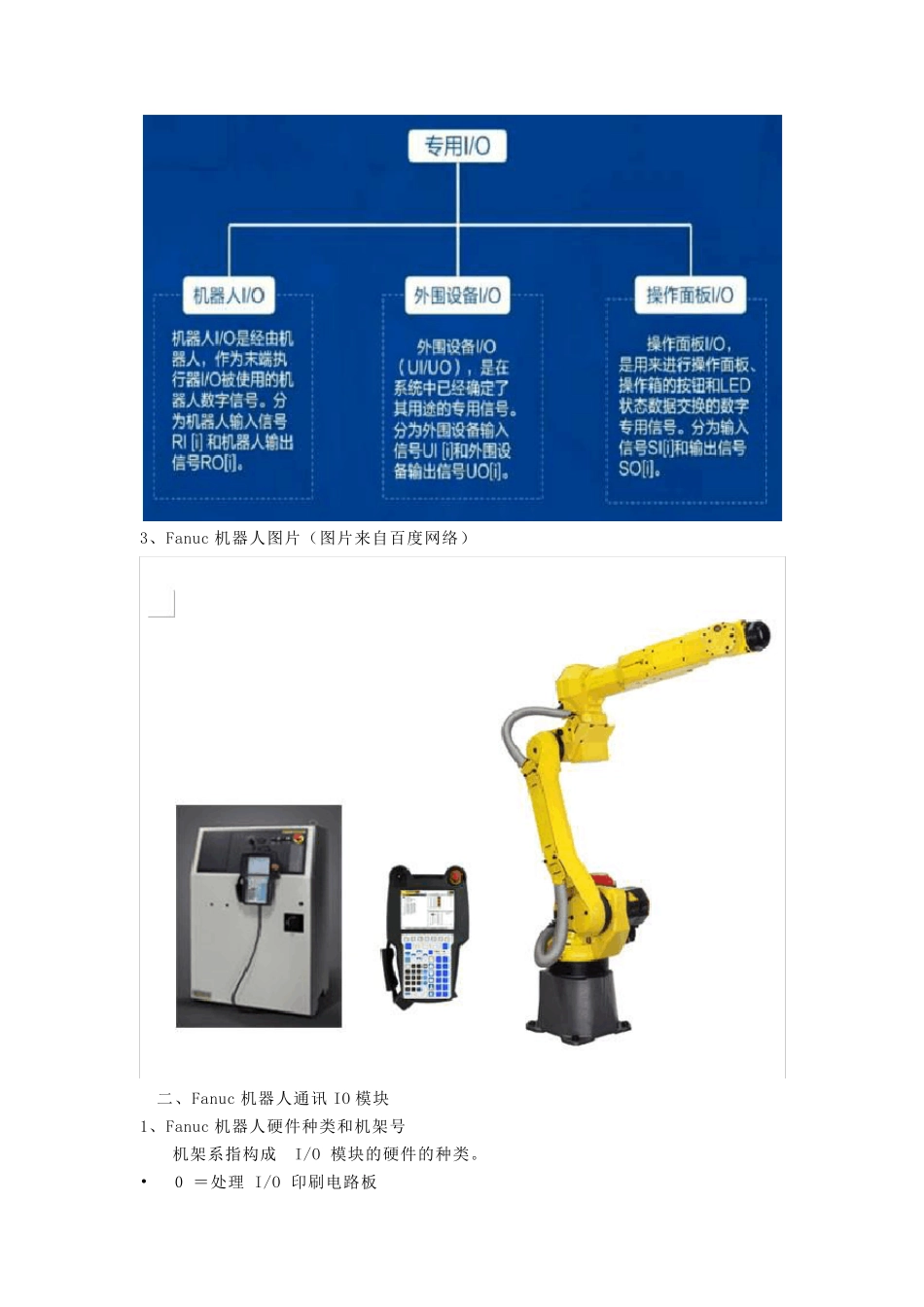
• 数 字 I/O:DI[ i ] / DO[ i ] 个 数 :512/512 • 群 组 I/O:GI[ i ] / GO[ i ] 个 数 :100/100,范 围:0-32767 • 模 拟 I/O:AI[ i ] / AO[ i ] 个 数 :64/64,范 围:0-16383 (2)专用 I/O 系统定义的专用IO 信号,用户不 能 重 新 定义功 能 的信号; 专用 I/O 是用途 已 经确 定的 I/O ,专用 I/O 有如下几种
• 外围设备(U O P ):UI[ i ] / UO[ i ] 个 数 :18/20 • 操 作 面 板 (S O P ):SI[ i ] / SO[ i ] 个 数 :15/15 • 机器人 I/O :RI[ i ] / RO[ i ] 个 数 :8/8 3、Fanuc 机器人图片(图片来自百度网络) 二、Fanuc 机器人通讯IO 模块 1、Fanuc 机器人硬件种类和机架号 机架系指构成 I/O 模块的硬件的种类
• 0 = 处 理 I/O 印 刷 电 路 板 • 1~16=I/O 单元 MODELA/B • 32 =I/O LINK 从动装置 • 4