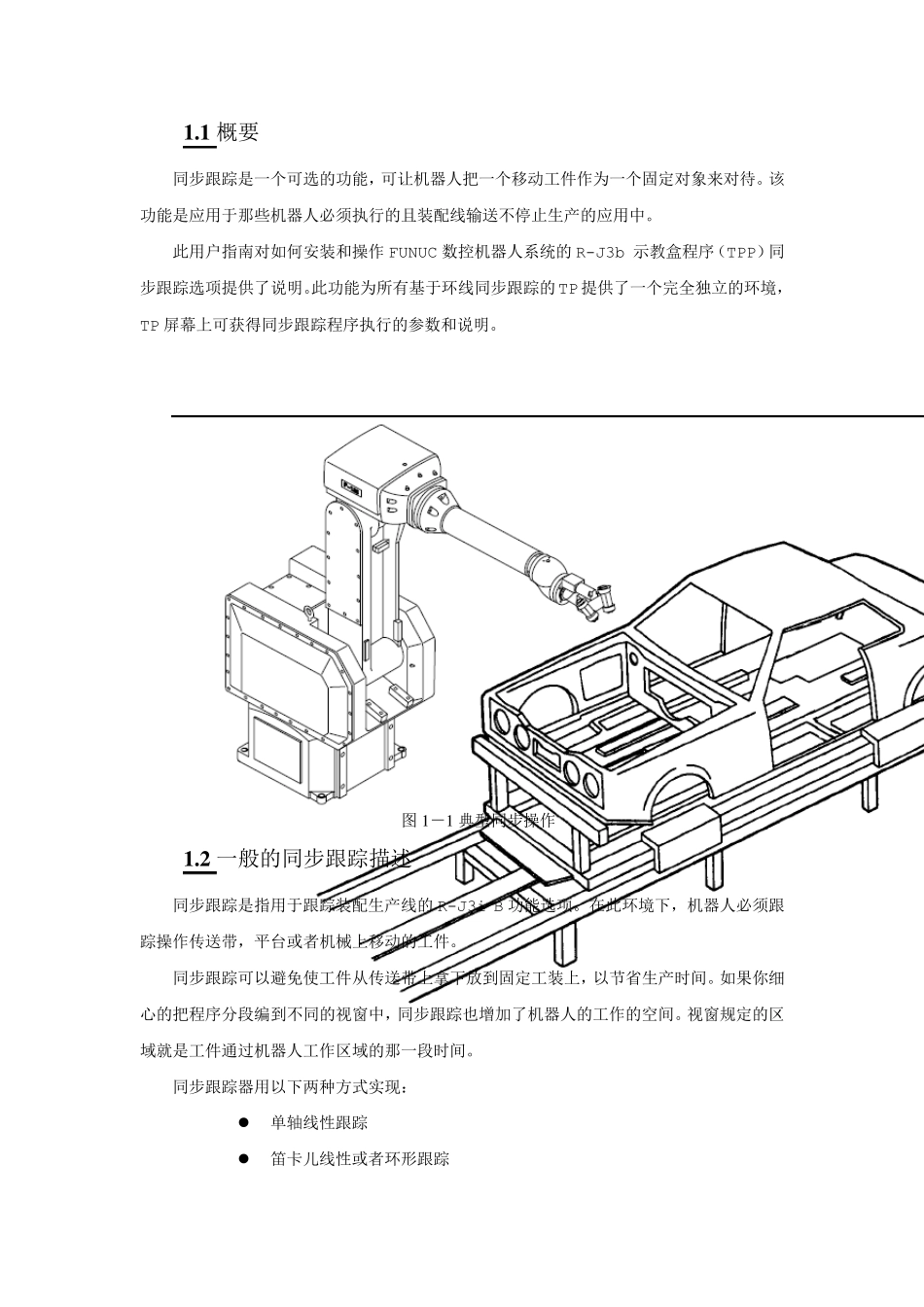
1 概要 同步跟踪是一个可选的功能,可让机器人把一个移动工件作为一个固定对象来对待
该功能是应用于那些机器人必须执行的且装配线输送不停止生产的应用中
此用户指南对如何安装和操作FUNUC 数控机器人系统的R-J3b 示教盒程序(TPP)同步跟踪选项提供了说明
此功能为所有基于环线同步跟踪的TP 提供了一个完全独立的环境, TP 屏幕上可获得同步跟踪程序执行的参数和说明
图 1 -1 典型同步操作 1
2 一般的同步跟踪描述 同步跟踪是指用于跟踪装配生产线的R-J3i B 功能选项
在此环境下,机器人必须跟踪操作传送带,平台或者机械上移动的工件
同步跟踪可以避免使工件从传送带上拿下放到固定工装上,以节省生产时间
如果你细心的把程序分段编到不同的视窗中,同步跟踪也增加了机器人的工作的空间
视窗规定的区域就是工件通过机器人工作区域的那一段时间
同步跟踪器用以下两种方式实现: 单轴线性跟踪 笛卡儿线性或者环形跟踪 1.3 单轴(轨道)跟踪 在单轴同步跟踪中,机器人延长轴(集成的或者非集成的基轴)的位置调整以能够跟踪直线传送带
传送带的运动方向必须于同步跟踪轴的方向相同
这种单轴跟踪方式就是我们熟知的轨道跟踪,因为传统的应用就是用一根轨道或者平台来实施跟踪动作
关于轨道跟踪,机器人手臂(不包括跟踪轴)是用程序来配置的
所有的动作类型(线性的,环形的或者两个结合使用)都是可行的
轨道跟踪是一种处理连续工件的简单方式
轨道跟踪用在大型系统中,且需要大量的场地空间
其大部分的应用易教易用
这种功能选项使单个系统能够完成大量的工作
1 .4 笛卡儿跟踪 笛卡儿跟踪是指固定的机器人,调整其刀锯中心点(TPC)的位置来跟踪传送带的动作
您在使用笛卡尔跟踪时应首要关注工作空间大小,否则您不能安装跟踪的铁轨轴
您可以通过示教模式有效提高机器人的工作能力
您也可以通过改变传