KUKA 机器人KRC2-KR3/KR6/KR16 开机调试步骤 STEP1 外接显示器/鼠标/键盘 显示器/鼠标/键盘接好后开机,选择冷启动,重新启动后正常
STEP2 安装夹钳软件包 开机后插入安装光盘,运行 SETUP
EXE,系统提示重启动,重启动后系统会自动冷启动安装完成
软件配置夹钳 TYPE=1 OUT1=2 OUT2=999 OUT3=999 OUT4=999 IN1=3 IN1=2 IN1=0 IN1=0 在配置/状态键下选择夹钳,夹钳图标才会显示出来
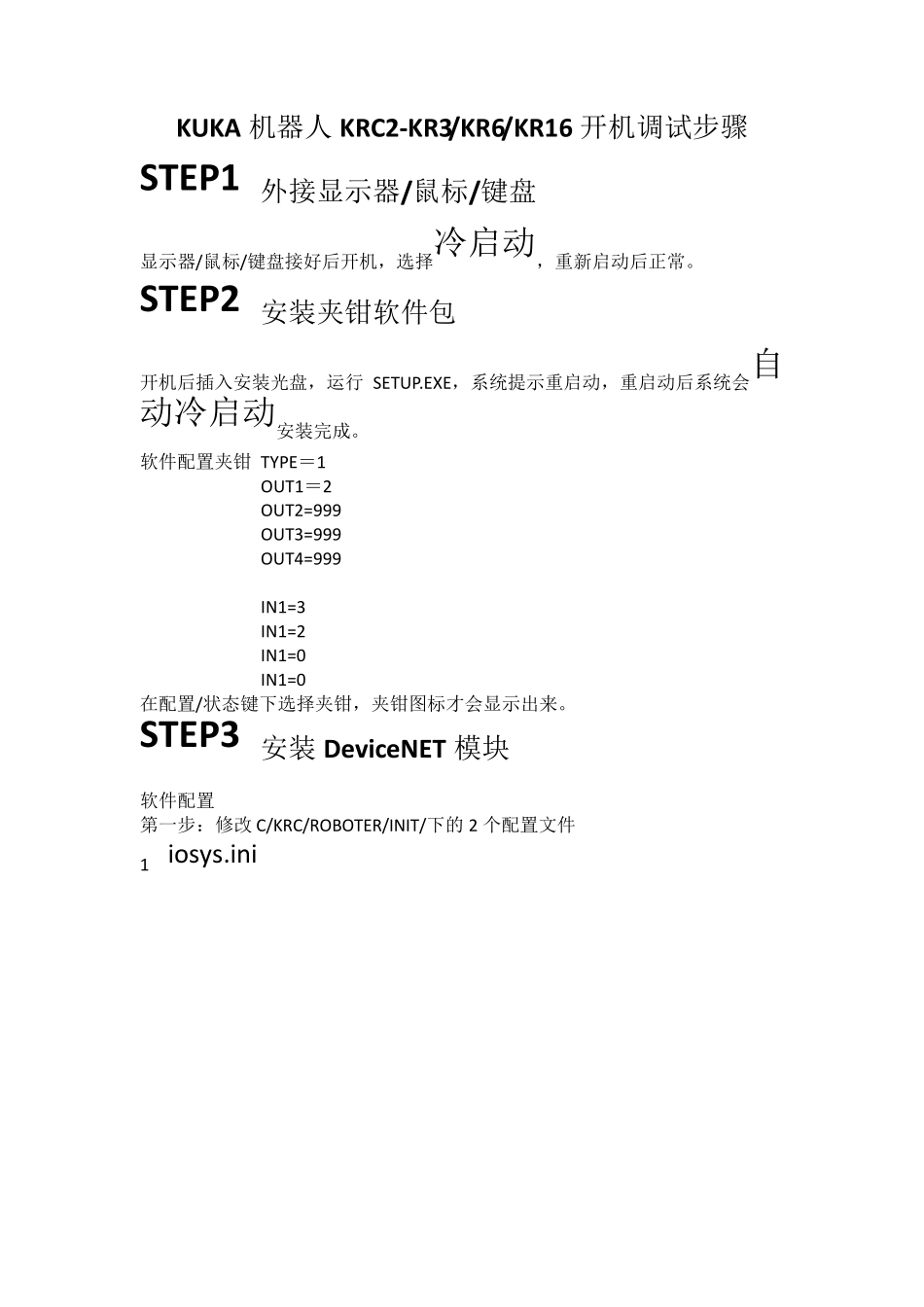
STEP3 安装 Dev iceNET 模块 软件配置 第一步:修改 C/KRC/ROBOTER/INIT/下的 2 个配置文件 1 iosys
ini 2 Devnet
ini 第二步:修改完成后冷启动完成
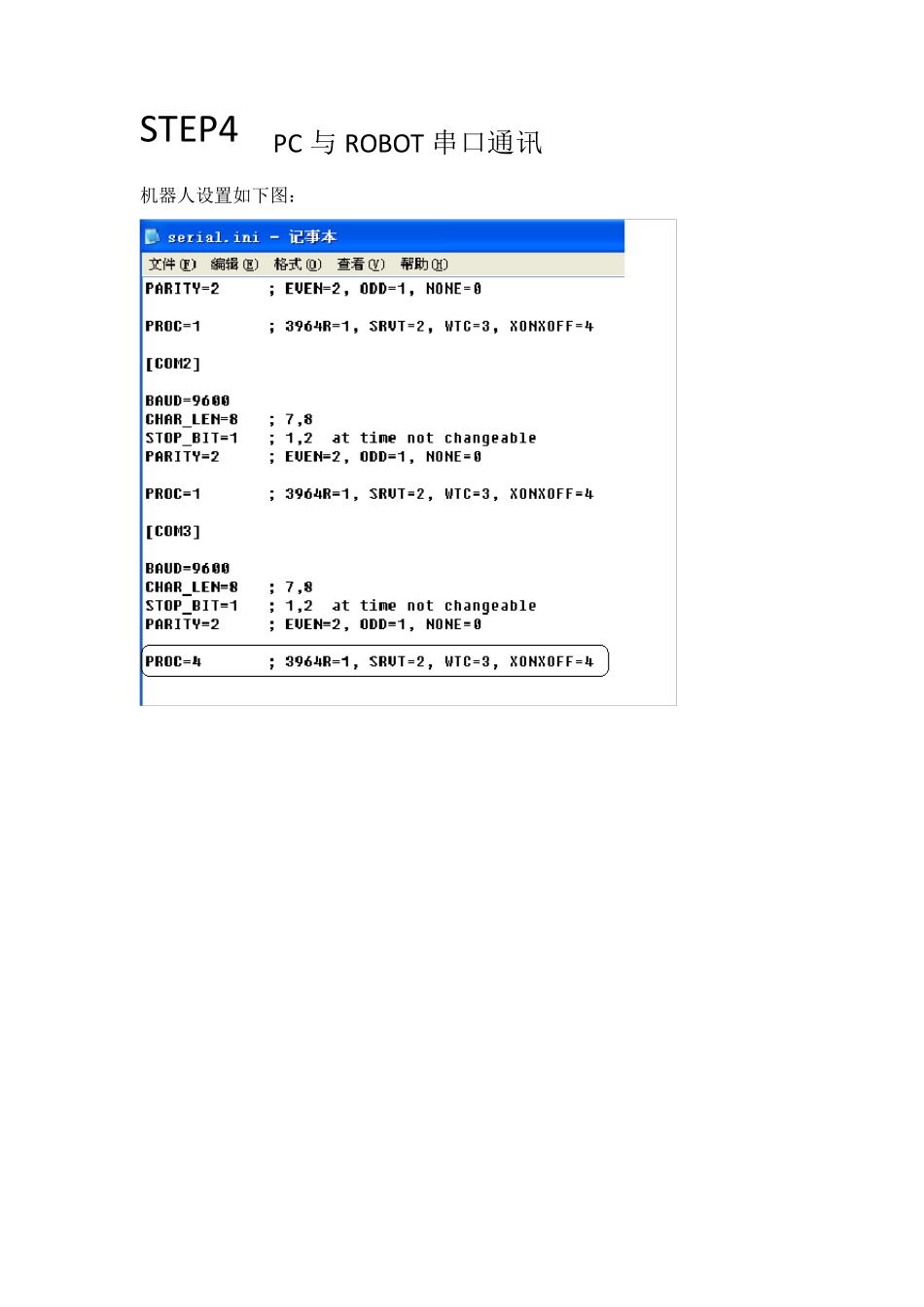
STEP4 PC 与ROBOT 串口通讯 机器人设置如下图: 加大缓冲区,配置如下图: PC 设置如下 3 图: