KUKA KR40PA 机器人运动学分析及simmulink 仿真 一.Kuka KR40PA 码垛机器人简介 Kuka KR40PA 机器人是一种有四个自由度的码垛机器人,有四个驱动器,很好地运用了平行四边形机构,固定其姿态从而大大简化了控制难度,并且提高了精度及寿命,本文所用kuka 码垛机器人如下图所示: 二、机构简图,及其简化
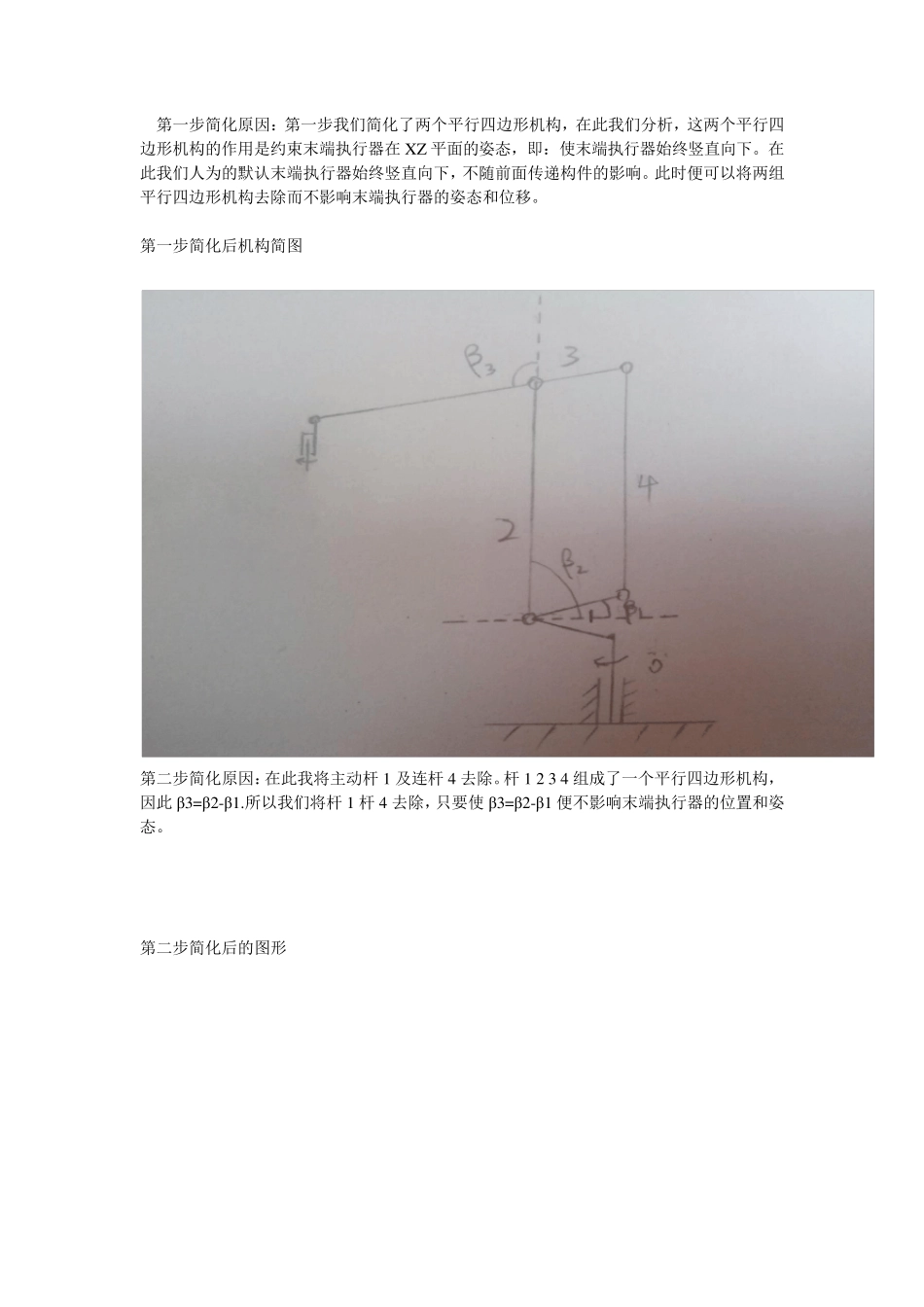
1、机构简图如下: 第一步简化原因:第一步我们简化了两个平行四边形机构,在此我们分析,这两个平行四边形机构的作用是约束末端执行器在XZ平面的姿态,即:使末端执行器始终竖直向下
在此我们人为的默认末端执行器始终竖直向下,不随前面传递构件的影响
此时便可以将两组平行四边形机构去除而不影响末端执行器的姿态和位移
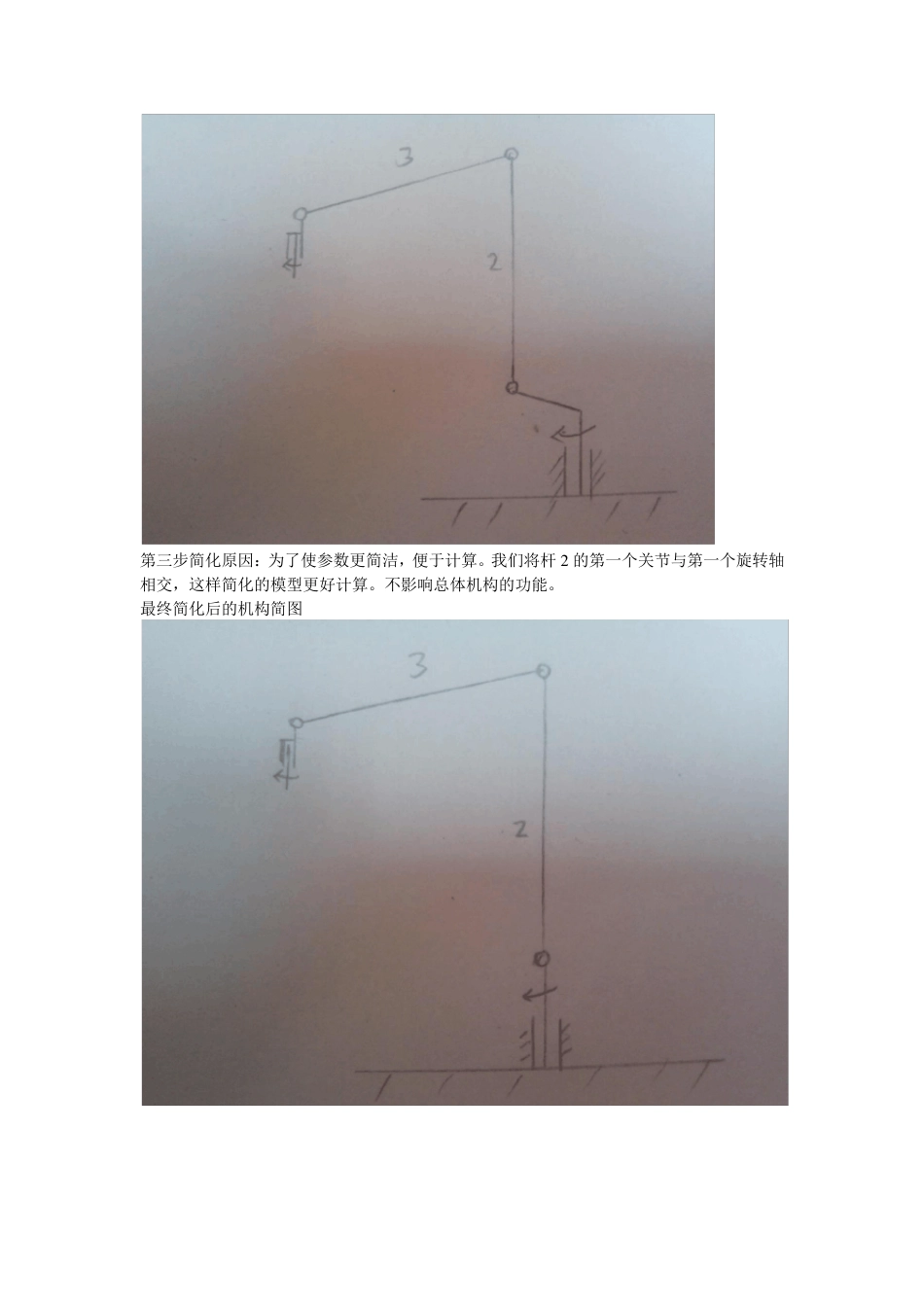
第一步简化后机构简图 第二步简化原因:在此我将主动杆 1 及连杆 4 去除
杆 1 2 3 4 组成了一个平行四边形机构,因此β3=β2-β1
所以我们将杆 1 杆 4 去除,只要使β3=β2-β1 便不影响末端执行器的位置和姿态
第二步简化后的图形 第三步简化原因:为了使参数更简洁,便于计算
我们将杆 2 的第一个关节与第一个旋转轴相交,这样简化的模型更好计算
不影响总体机构的功能
最终简化后的机构简图 三、建立连杆坐标系
如下图: 四、D-H 参数表 i α i-1 ai-1 di θi 1 0 0 0 θ1 2 -90 0 0 θ2 3 0 l2 0 θ3 4 0 l3 0 θ4 5 90 0 0 θ5 五、求正运动学公式 T10 =[c1− s1s1c1000000001001] T21 =[c2− s2000010− s2− c2000001] T32 =[c3− s3s3c30l20000001001] T43 =[c4− s4s4c40l30000001001] T54 =[c5− s50000− 10s5c5000