精品文档---下载后可任意编辑 专业实践课题:四足追光机器人姓 名:学 院:机械工程学院专 业: 机械 设计制造 及 其 自动化 班 级:学 号:指导老师: 四足追光机器人一、实验目的用“创意之星”机器人套件组装可以进行追光行走的四足机器人;二、实验套件(创意之星)1
机械结构:基本结构件、舵机动力关节、可转向轮子、机械爪等;2
控制系统:控制卡、舵机、直流电机、各类传感器、电源等;3
控制软件:NorthSTAR 图形化开发环境三、实验步骤1、确定其基本功能基本功能:a. 在平地上通过步态设计,可以正常迈步行走
同时头部传感器检测前方光源,便于及时调整运行动作,追光行走
b. 当左侧红外线传感器检测到光源强于右侧红外线传感器检测到的光源时,机器人运行步态会改变,控制机器人左转
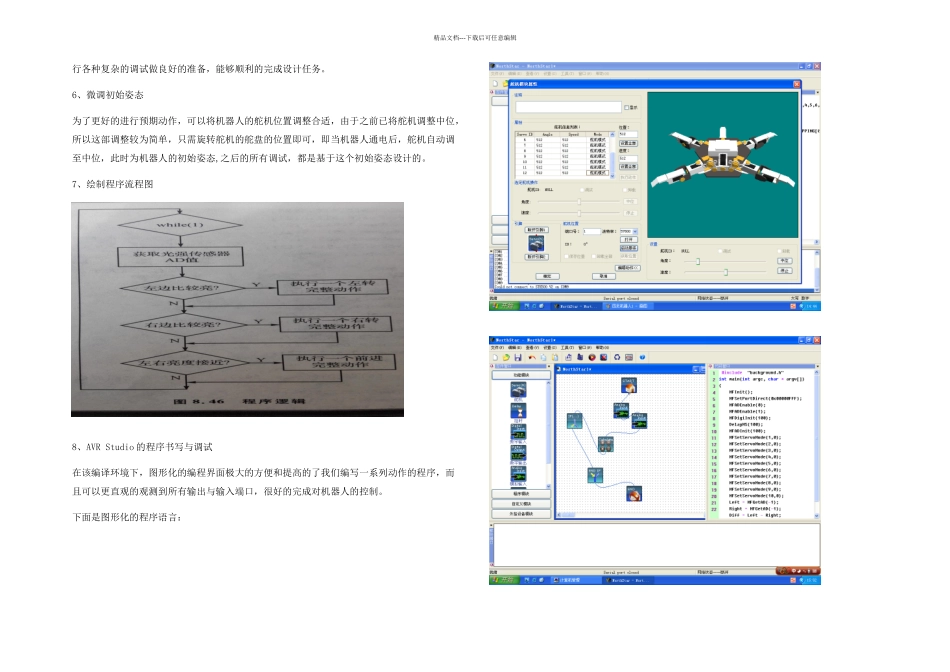
右侧的光源强于左侧的光源时用同样的原理控制机器人右转
c. 当两侧均检测到光源亮度相等时,调整步态,追光机器人会向前走
直至检测不到光源停止,再控制向后退
2、机构设计整个巡视机器人由大致三个模块组成:8 个舵机组成四足机器人的 4 条腿模块;b
由 2 个舵机组成四足机器人尾部部分;c
由 2 个红外接近传感器和 1 个舵机组成的感应模块
3、机构的装配整个四足避障机器人由 1 个控制板,1 个舵机和两个红外接近传感器组成可转动头部,8个舵机组成主要的 4 条机械腿,由两个舵机构成尾部部分
整个四足机器人共由 11 个舵机、两个红外接近传感器及“创意之星”机器人零部件组成
安装可分为零件的安装,部件的组装以及最后的总装过程
根据预先设计好的机器人结构方案,组装四条腿的部件、头部、尾部以及机器人主体部分,最后组装到一块,形成完整的整体结构
4、连接电线由于我们此次使用的是创意之星的标准套件,舵机接线、传感器模拟与数字端口的连接都及其方便简单
5、设置各个舵机的限制参数一方面保护所使用器件的性能,防止