精品文档---下载后可任意编辑哈尔滨工程大学 信息与通信工程学院 080813 班摘要:关键词:单片机,PWM,光电传感器,运货小车1
1 智能搬运小车讨论的背景和目的:运货是各个行业不可或缺的过程,人工运货随着经济的快速进展,不能完全满足市场的需求
世界上许多国家都在积极进行智能车辆的讨论和开发设计
移动机器人是机器人学中的一个重要分支,出现于 20 世纪 60 年代
当时斯坦福讨论院的 NilsNilssen 和 charlesRosen 等人,在 1966 年至 1972 年中研制出了取名 shakey 的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制
从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注
智能搬运小车可以安装不同的末端以完成各种不同形状和状态的工件搬运工作,可以广泛应用于机床上下料,冲压机自动化生产线,自动装配流水线,码垛搬运,集装箱等的自动搬运,大大减轻了人类繁重的体力劳动,具有宽阔的市场前景
2 智能搬运小车的功能介绍:智能搬运小车希望能够希望得到可以自动抓取货物,循迹行进,自动卸货物的功能
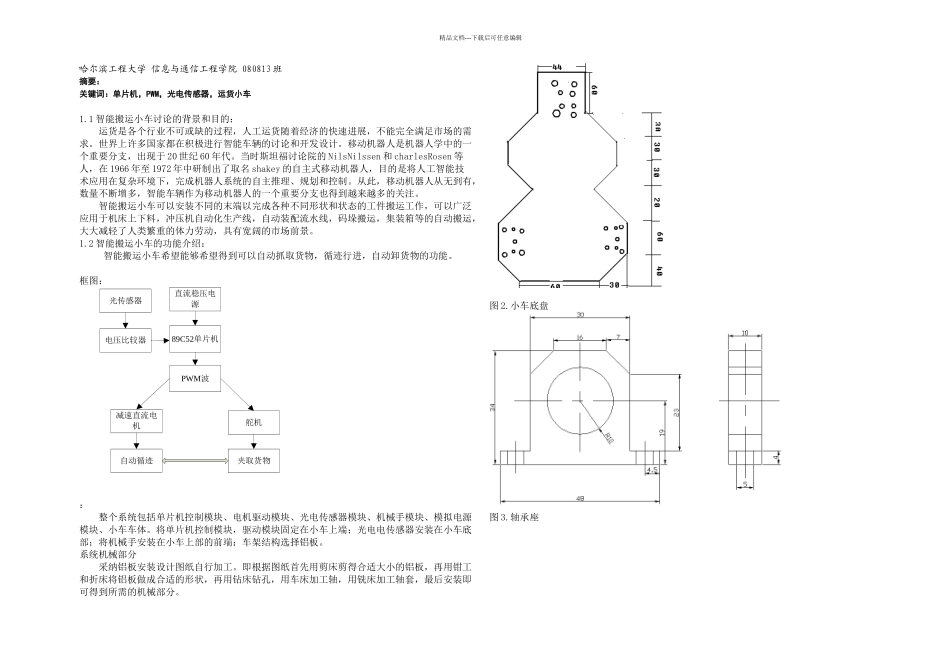
框图::整个系统包括单片机控制模块、电机驱动模块、光电传感器模块、机械手模块、模拟电源模块、小车车体
将单片机控制模块,驱动模块固定在小车上端;光电电传感器安装在小车底部;将机械手安装在小车上部的前端;车架结构选择铝板
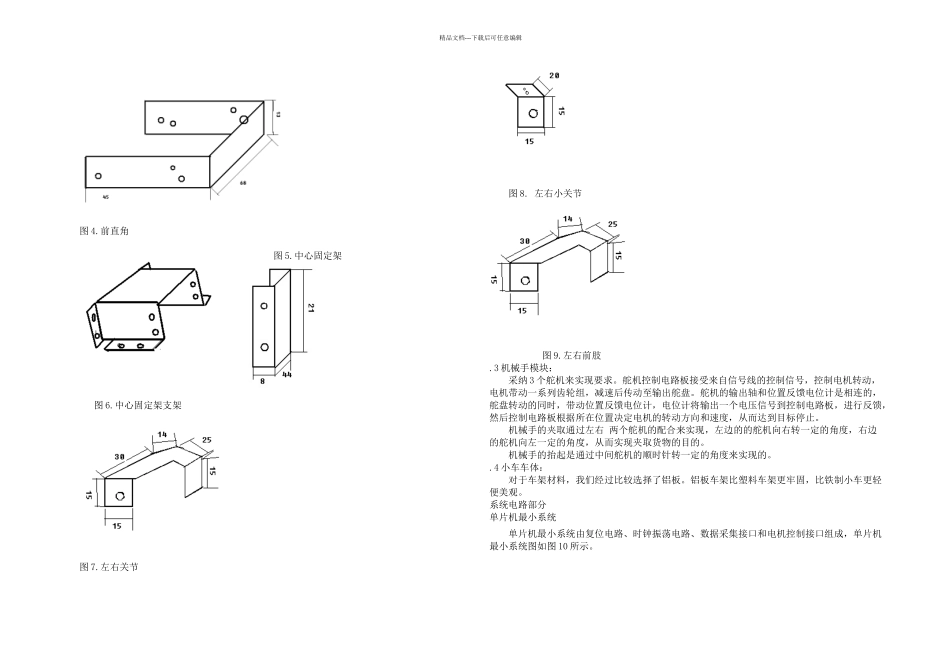
系统机械部分 采纳铝板安装设计图纸自行加工
即根据图纸首先用剪床剪得合适大小的铝板,再用钳工和折床将铝板做成合适的形状,再用钻床钻孔,用车床加工轴,用铣床加工轴套,最后安装即可得到所需的机械部分
小车底盘图 3
轴承座89C52单片机PWM波直流稳压电源减速直流电机光传感器自动循迹舵机夹取货物电压比较器精品文档---下载后可任意编辑图 4