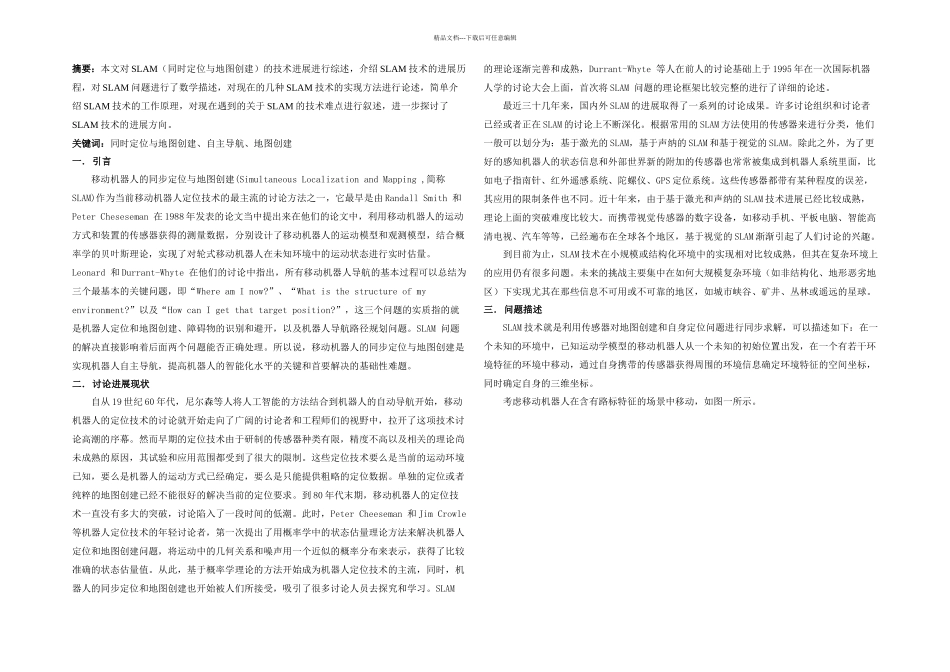
精品文档---下载后可任意编辑摘要:本文对 SLAM(同时定位与地图创建)的技术进展进行综述,介绍 SLAM 技术的进展历程,对 SLAM 问题进行了数学描述,对现在的几种 SLAM 技术的实现方法进行论述,简单介绍 SLAM 技术的工作原理,对现在遇到的关于 SLAM 的技术难点进行叙述,进一步探讨了SLAM 技术的进展方向
关键词:同时定位与地图创建、自主导航、地图创建一.引言移动机器人的同步定位与地图创建(Simultaneous Localization and Mapping ,简称SLAM)作为当前移动机器人定位技术的最主流的讨论方法之一,它最早是由 Randall Smith 和Peter Cheseseman 在 1988 年发表的论文当中提出来在他们的论文中,利用移动机器人的运动方式和装置的传感器获得的测量数据,分别设计了移动机器人的运动模型和观测模型,结合概率学的贝叶斯理论,实现了对轮式移动机器人在未知环境中的运动状态进行实时估量
Leonard 和 Durrant-Whyte 在他们的讨论中指出,所有移动机器人导航的基本过程可以总结为三个最基本的关键问题,即“Where am I now
”、“What is the structure of my environment
”以及“How can I get that target position
”,这三个问题的实质指的就是机器人定位和地图创建、障碍物的识别和避开,以及机器人导航路径规划问题
SLAM 问题的解决直接影响着后面两个问题能否正确处理
所以说,移动机器人的同步定位与地图创建是实现机器人自主导航,提高机器人的智能化水平的关键和首要解决的基础性难题
二.讨论进展现状自从 19 世纪 60 年代,尼尔森等人将人工智能的方法结合到机器人的自动导航开始,移动机器人的定位技术的讨论就开始走向了广阔的