四翼飞行器动力学分析与建模 1
引言 四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼
这四轴飞行器(Quadrotor)是一种多旋翼飞行器
四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态
因为它固有的复杂性,历史上从未有大型的商用四轴飞行器
近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观
本章通过分析四旋翼直升机的动力学机制,运用已知的物理定律和方程来建立表征系统动态过程的数学模型
四旋翼飞行器简介 2
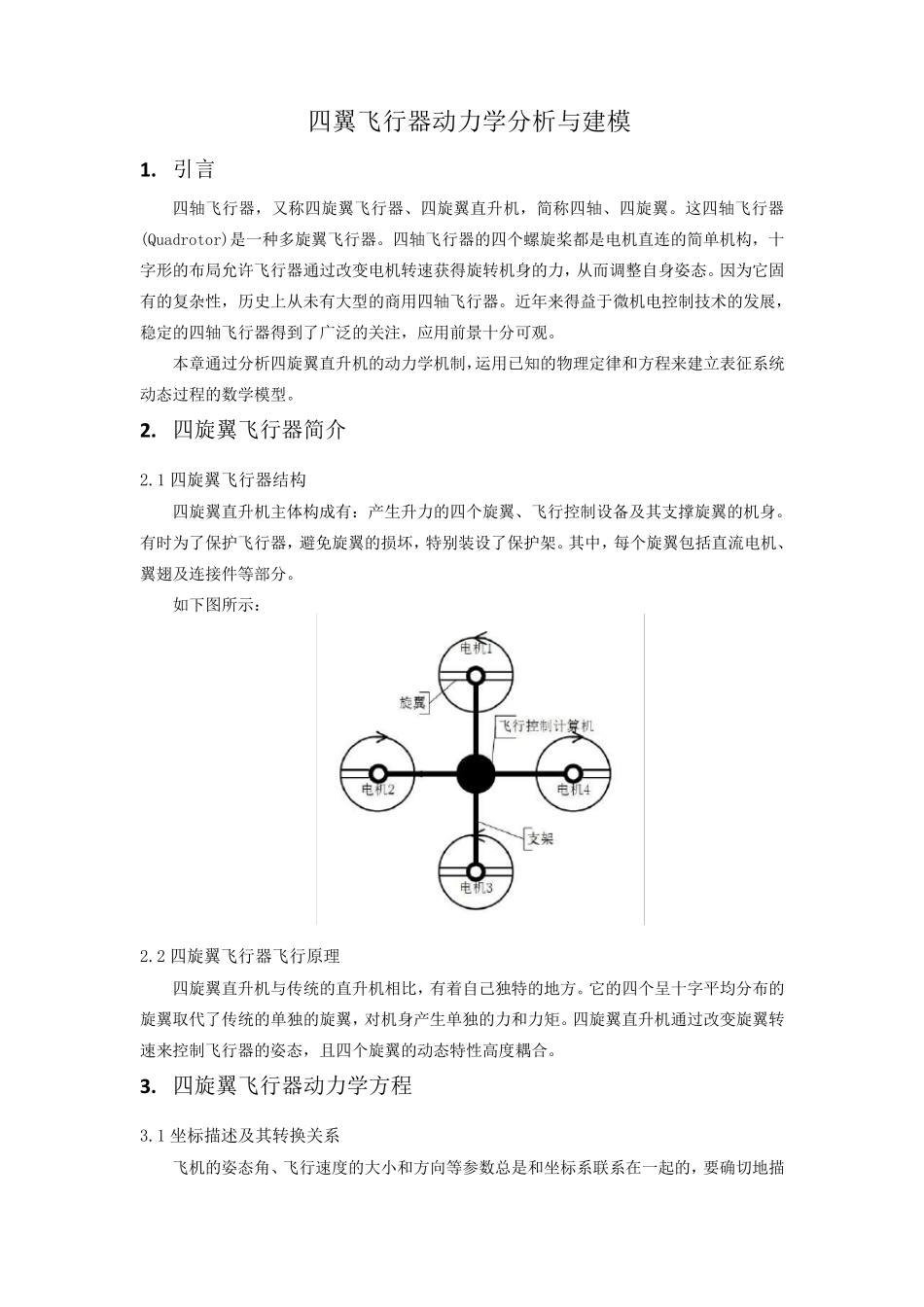
1 四旋翼飞行器结构 四旋翼直升机主体构成有:产生升力的四个旋翼、飞行控制设备及其支撑旋翼的机身
有时为了保护飞行器,避免旋翼的损坏,特别装设了保护架
其中,每个旋翼包括直流电机、翼翅及连接件等部分
如下图所示 : 2
2 四旋翼飞行器飞行原 理 四旋翼直升机与传 统的直升机相 比 ,有着 自己 独 特的地 方
它的四个呈 十字平 均 分布的旋翼取 代 了传 统的单独 的旋翼,对 机身产生单独 的力和力矩
四旋翼直升机通过改变旋翼转速来控制飞行器的姿态,且 四个旋翼的动态特性高 度 耦 合
四旋翼飞行器动力学方程 3
1 坐 标 描 述 及其转换 关系 飞机的姿态角 、飞行速度 的大小 和方向 等参 数总 是和坐 标 系联 系在 一起 的,要 确 切 地 描述飞机的运动状态,就要先建立适当的坐标系
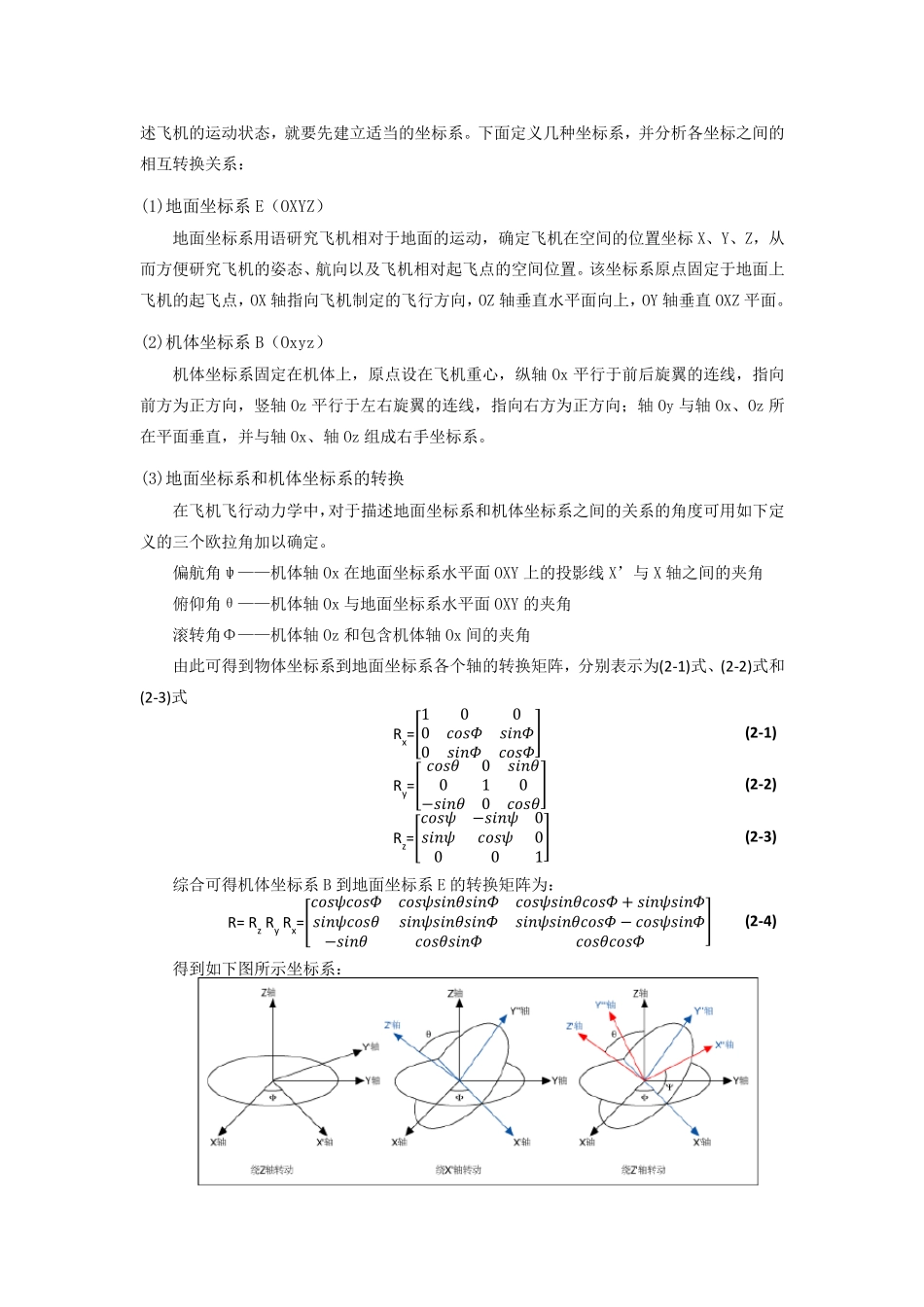
下面定义几种坐标系,并分析各坐标之间的相互转换关系: (1)地面坐标系E(OXYZ) 地面坐标系用语研究飞机相对于地面的运动,确定飞机在空间的位置坐标X、Y、Z,从而方便研究飞机的姿态、航向以及飞机相对起飞点的空间位置
该坐标系原点固定于地面上飞机的起飞点,OX 轴指向飞机制定的飞行方向,OZ 轴垂直水平面向上,OY 轴垂直OXZ