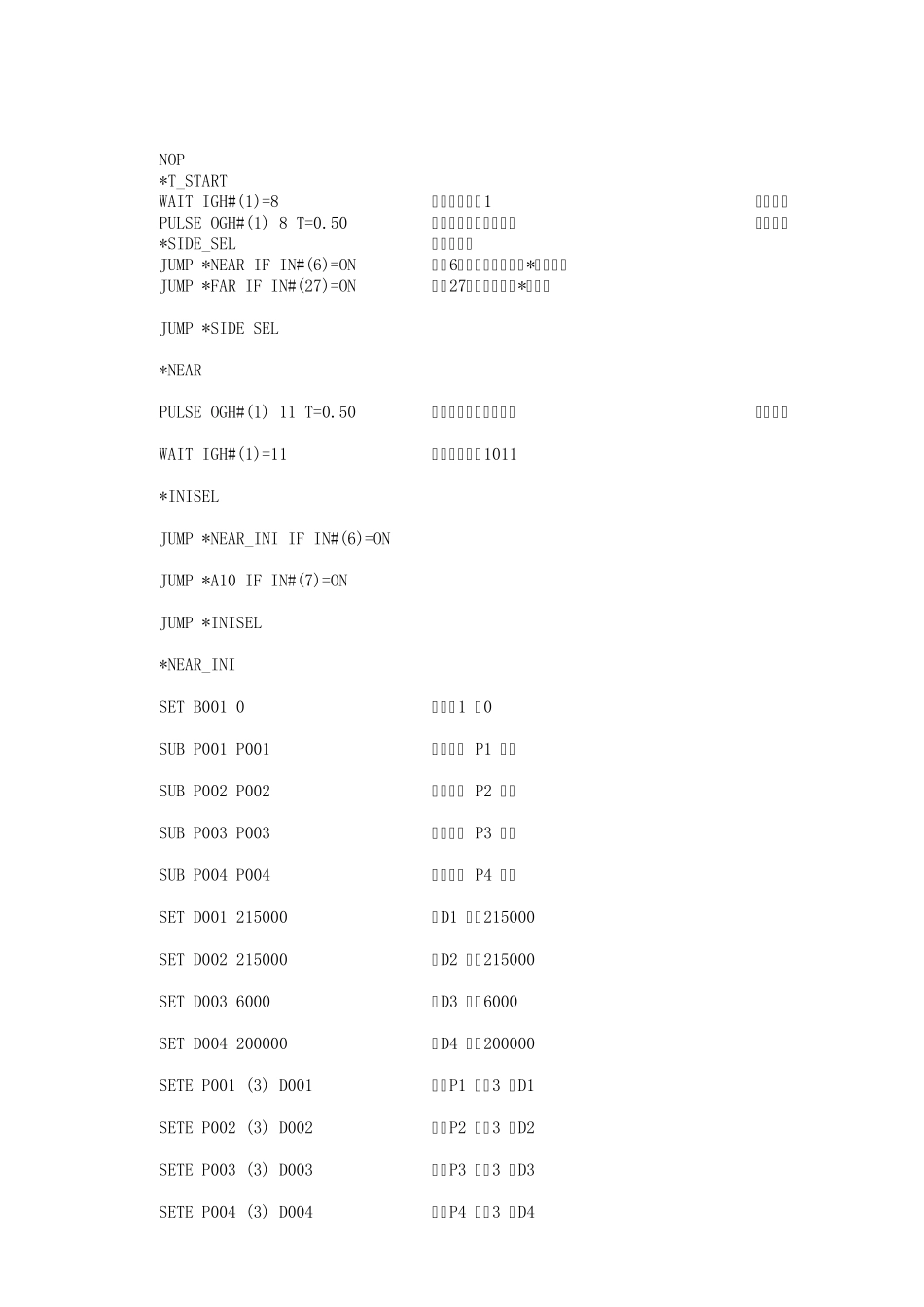
NOP *T_START WAIT IGH#(1)=8等待信号全为1输入组号PULSE OGH#(1) 8 T=0
50外部输出信号输出脉冲输出组号*SIDE_SEL 标号字符串JUMP *NEAR IF IN#(6)=ON信号6有输入信号跳转到*nearJUMP *FAR IF IN#(27)=ON信号27有信号跳转到*farJUMP *SIDE_SEL*NEAR PULSE OGH#(1) 11 T=0
50外部输出信号输出脉冲输出组号WAIT IGH#(1)=11等待第一组为1011*INISEL JUMP *NEAR_INI IF IN#(6)=ONJUMP *A10 IF IN#(7)=ONJUMP *INISEL*NEAR_INISET B001 0设定b1 为0SUB P001 P001数据相减 P1 置零SUB P002 P002数据相减 P2 置零SUB P003 P003数据相减 P3 置零SUB P004 P004数据相减 P4 置零SET D001 215000将D1 设为215000SET D002 215000将D2 设为215000SET D003 6000将D3 设为6000SET D004 200000将D4 设为200000SETE P001 (3) D001设定P1 元素3 为D1SETE P002 (3) D002设定P2 元素3 为D2SETE P003 (3) D003设定P3 元素3 为D3SETE P004 (3) D004设定P4 元素3 为D4SUB P011 P011置零SUB P012 P012置零SUB P015 P015置零SUB P016 P016 置零MOVJ C00000 VJ=25
00移动到位置 C0MOVJ C00001 VJ=25
00移动到位置 C1MOVJ C00002 VJ=25
00移动到位置