步 进 电动机 步进电动机驱动器 位置控 制单元 反转正转 反转正转 脉冲信号 方向信号 正向脉冲 反向脉冲 (a) 脉冲+方向 (b) 正脉冲+负脉冲 实验五 步进电机单轴定位控制实验 一、实验目的 1
学习和掌握步进电机及其驱动器的操作和使用方法; 2
学习和掌握步进电机单轴定位控制方法; 3.学习和掌握PLC 单轴定位模块的基本使用方法
二、实验原理 步进电动机是一种将电脉冲信号转换为相应的角位移或直线位移量的机电执行元件,即步进电动机输入的是电脉冲信号,输出的是角位移或直线位置
每给一个脉冲,步进电动机转动一个角度,这个角度称为步距角
运动速度正比于脉冲频率,角位移正比于脉冲个数
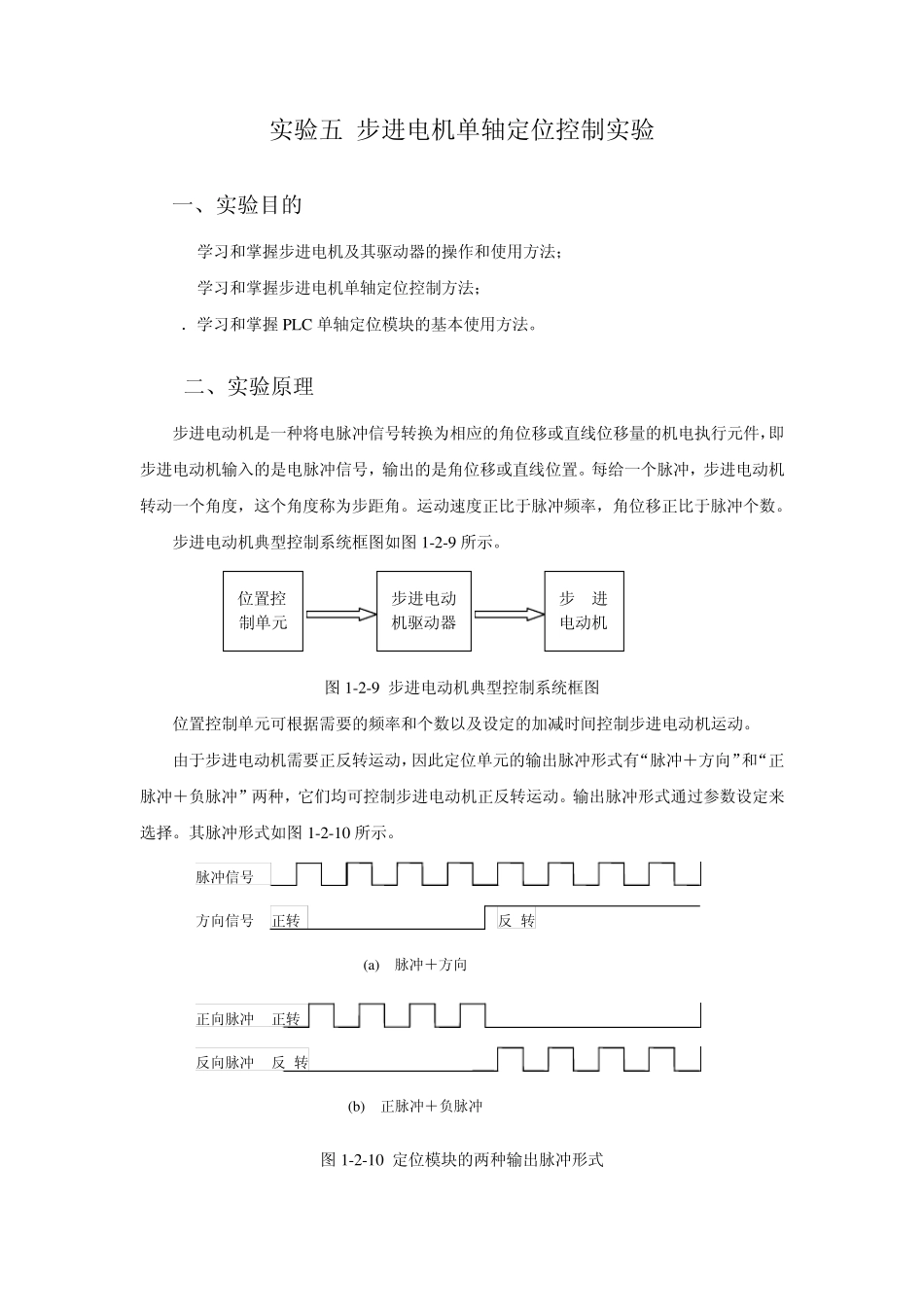
步进电动机典型控制系统框图如图1-2-9 所示
图1-2-9 步进电动机典型控制系统框图 位置控制单元可根据需要的频率和个数以及设定的加减时间控制步进电动机运动
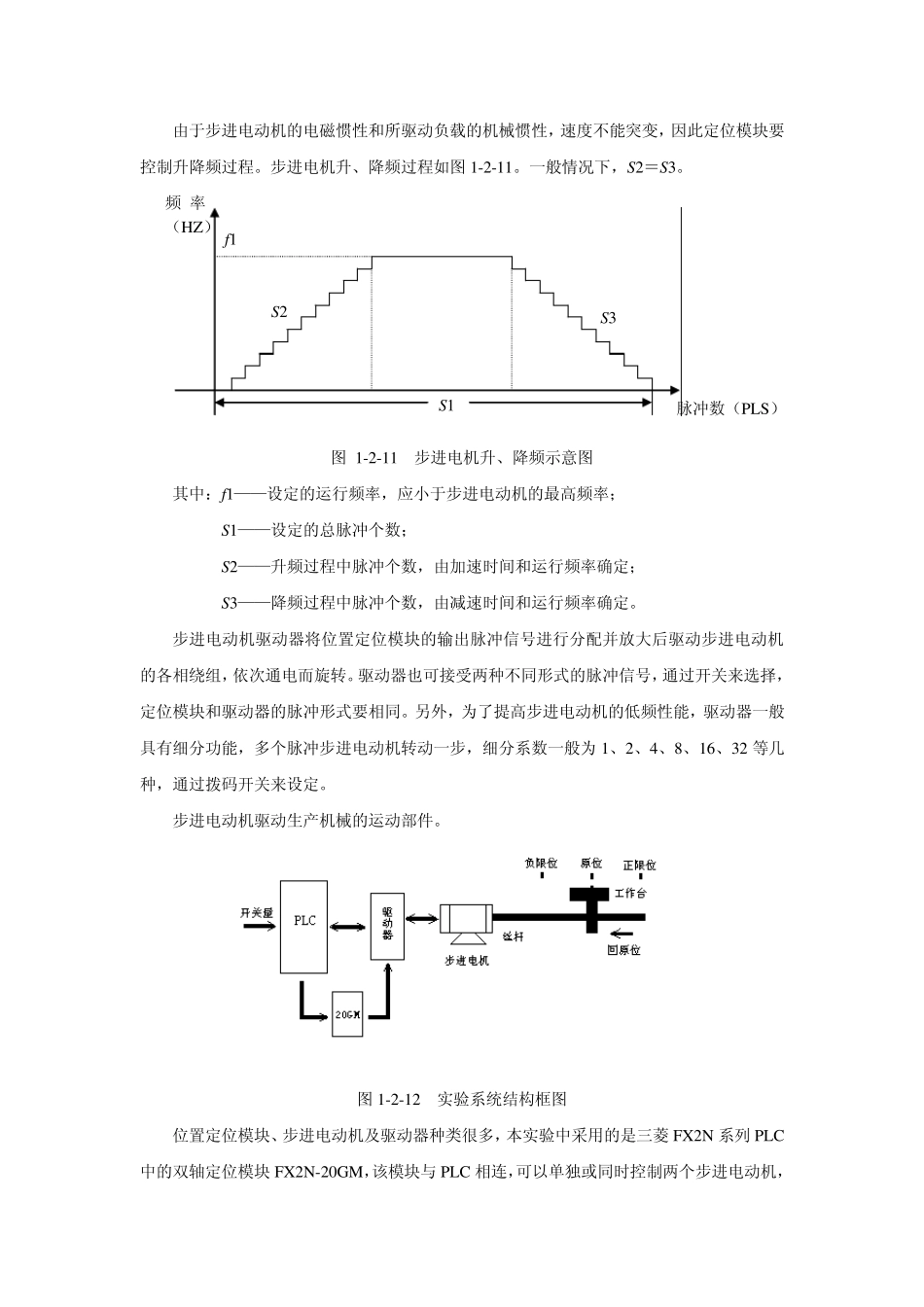
由于步进电动机需要正反转运动,因此定位单元的输出脉冲形式有“脉冲+方向”和“正脉冲+负脉冲”两种,它们均可控制步进电动机正反转运动
输出脉冲形式通过参数设定来选择
其脉冲形式如图1-2-10 所示
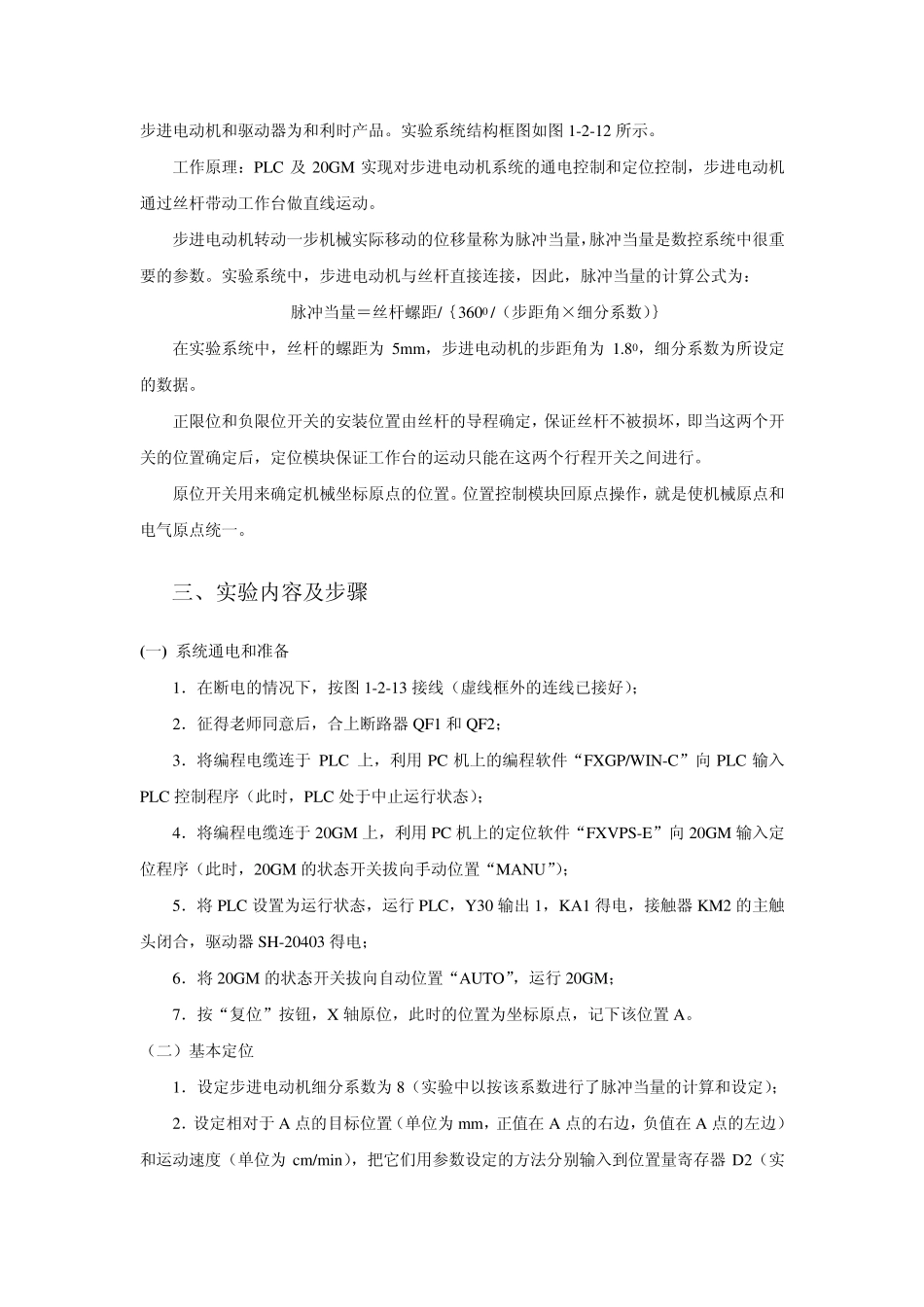
图1-2-10 定位模块的两种输出脉冲形式 频 率 (HZ) 脉冲数(PLS) f1 S2 S3 S1 由于步进电动机的电磁惯性和所驱动负载的机械惯性,速度不能突变,因此定位模块要控制升降频过程
步进电机升、降频过程如图1-2-11
一般情况下,S2=S3
图 1-2-11 步进电机升、降频示意图 其中:f1——设定的运行频率,应小于步进电动机的最高频率; S1——设定的总脉冲个数; S2——升频过程中脉冲个数,由加速时间和运行频率确定; S3——降频过程中脉冲个数,由减速时间和运行频率确定
步进电动机驱动器将位置定位模块的输出脉冲信号进行分配并放大后驱动步进电动机的各相绕组,依次通电而旋转
驱动器也可接受两种不同形式