第1 页 (总共11 页) HJD-JZ 2 自动化夹具实验台实验指导书 实验一 六点定位和手动夹具实验 1 六点定位实验 一、 实验目的 通过六点定位实验,学习和掌握六点定位原理,完全定位、不完全定位,欠定位、过定位的区别和使用方法等
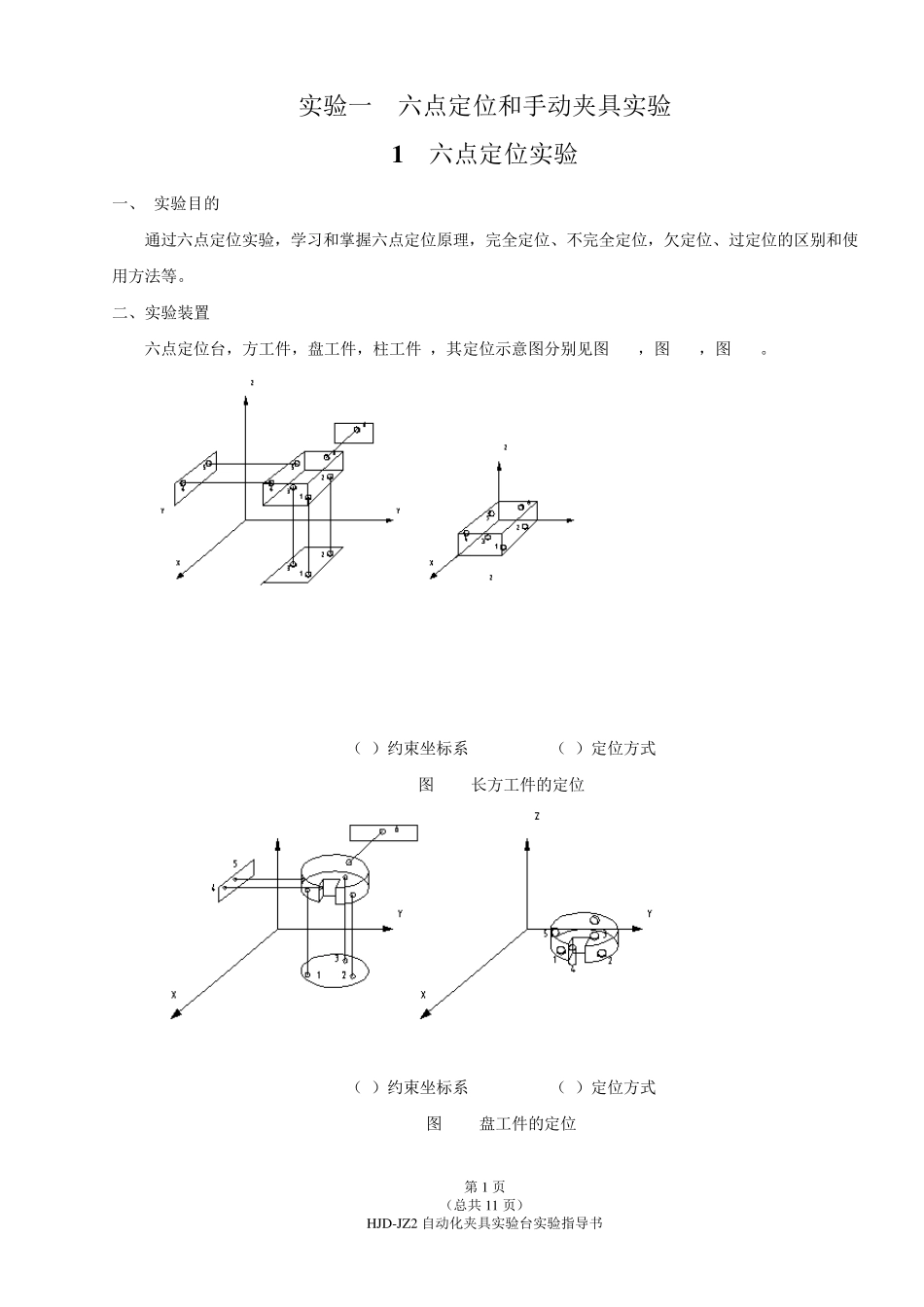
二、实验装置 六点定位台,方工件,盘工件,柱工件 ,其定位示意图分别见图 1-1,图 1-2,图 1-3
(a)约束坐标系 (b)定位方式 图 1
1 长方工件的定位 (a)约束坐标系 (b)定位方式 图 1
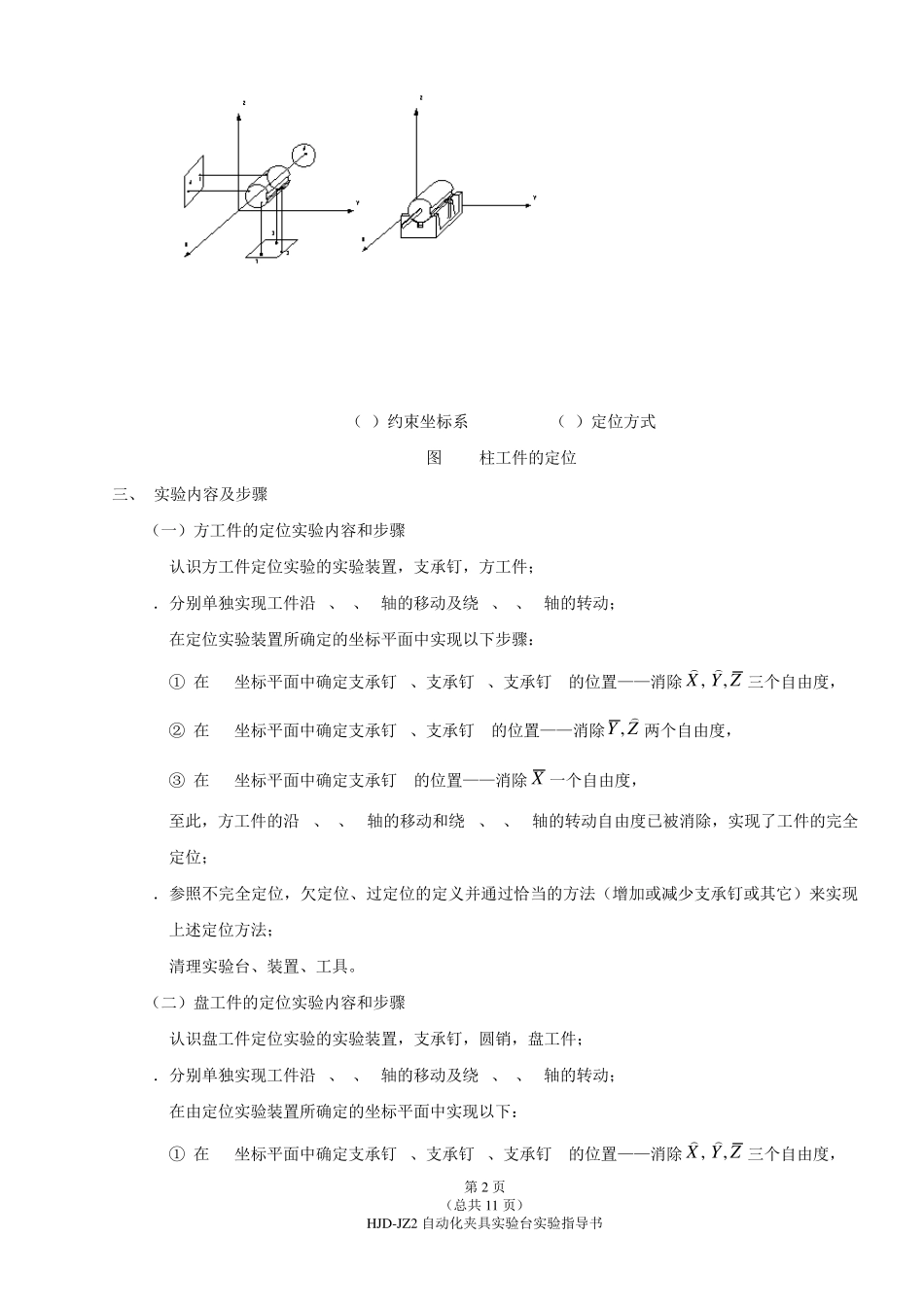
2 盘工件的定位 第2 页 (总共11 页) HJD-JZ 2 自动化夹具实验台实验指导书 (a)约束坐标系 (b)定位方式 图1
3 柱工件的定位 三、 实验内容及步骤 (一)方工件的定位实验内容和步骤 1
认识方工件定位实验的实验装置,支承钉,方工件; 2.分别单独实现工件沿X、Y、Z轴的移动及绕X、Y、Z轴的转动; 3
在定位实验装置所确定的坐标平面中实现以下步骤: ① 在XY坐标平面中确定支承钉1、支承钉2、支承钉3的位置——消除,XZY,三个自由度, ② 在XZ坐标平面中确定支承钉4、支承钉5的位置——消除ZY ,两个自由度, ③ 在YZ坐标平面中确定支承钉6的位置——消除 X 一个自由度, 至此,方工件的沿X、Y、Z轴的移动和绕X、Y、Z轴的转动自由度已被消除,实现了工件的完全定位; 4.参照不完全定位,欠定位、过定位的定义并通过恰当的方法(增加或减少支承钉或其它)来实现上述定位方法; 5
清理实验台、装置、工具
(二)盘工件的定位实验内容和步骤 1
认识盘工件定位实验的实验装置,支承钉,圆销,盘工件; 2.分别单独实现工件沿X、Y、Z轴的移动及绕X、Y、Z轴的转动; 3
在由定位实验装置所确定的坐标平面中实现以下: ① 在XY坐标平面中确定支承钉1、支承钉2、支承钉3的位置——消除,XZY,三个