1©廣東科技學院GUANGDONGUNIVERSITYOFSCIENCE&TECHNOLOGY清洁机器人专题报告姓名:廖聪学号:2015143227层次:本科专业:机械电子工程班级:15 机电 2 班指导教师:吴培旭2018 年 5 月清洁机器人一、清洁机器人专题概述随着传感器、控制、驱动及材料等领域的技术进步,机器人首次在制造领域2以外的服务行业开辟了新领域
清洁机器人就是一种新型的服务机器人
清洁机人集机械学、电子技术,传感器技术、计算机技术、控制技术、机器人技术、人工智能等多学科为一体
清洁机器人作为智能移动机器人实用化发展的先行者,其研究始于 20 世纪 80 年代,到目前为止,已经产生了一些概念样机和产品
清洁机器人的发展,带动了家庭服务机器人行业的发展,也促进了移动机器人技术、图像和语音识别、传感器等相关技术的发展
清洁机器人具有如下的特点:(1)清洁机器人自带电源,小巧轻便,操作简单、自主性强、具有很强的实用性,(2)清洁机器人的工作环境主要为普通家庭环境,但要求有较好的环境适应性
二、清洁机器人的分类1、按清洁机器人的用途可以分为扫地机器人、拖地机器人、吸尘机器人、空气净化机器人、搽擦窗机器人等
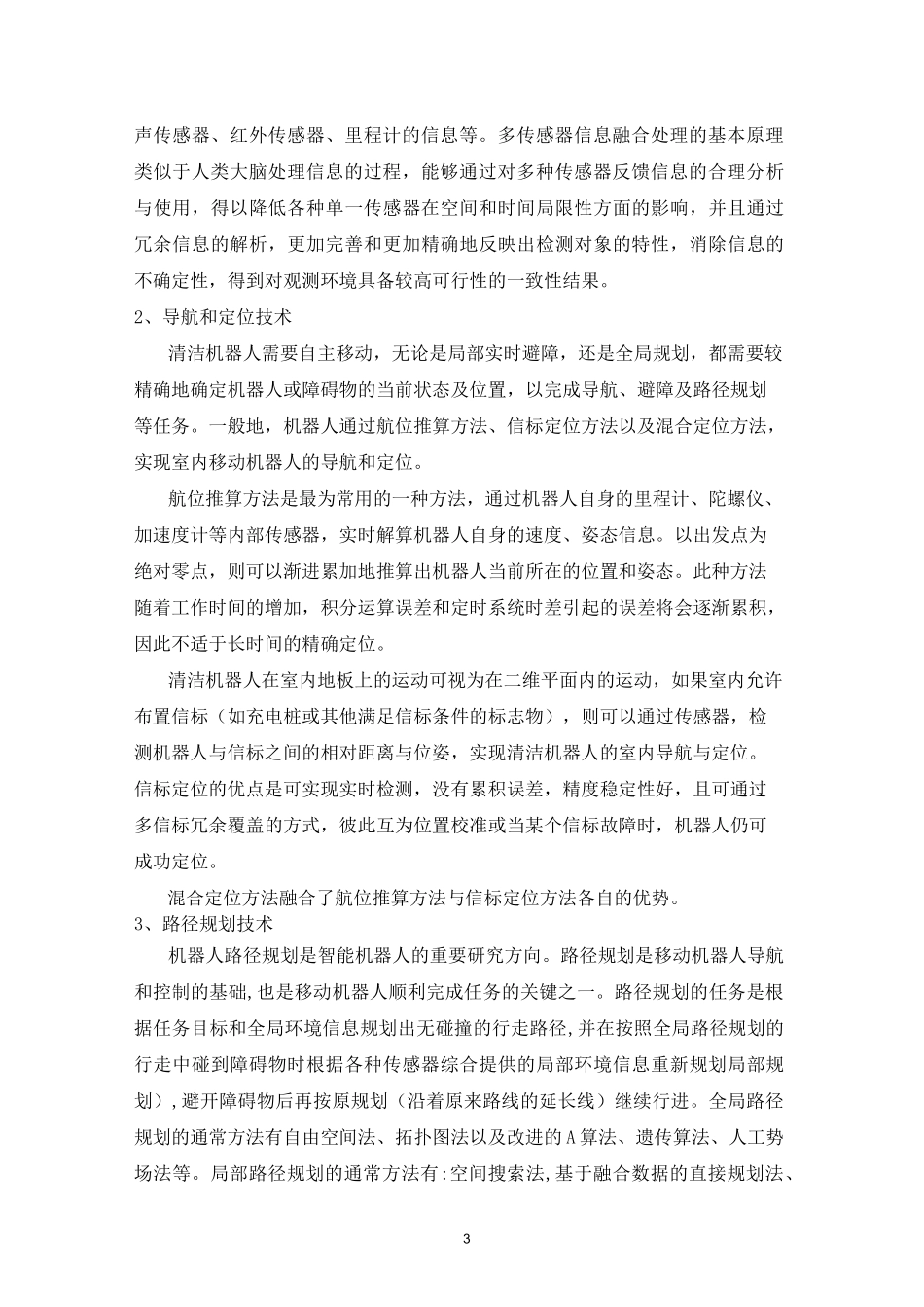
2、按清洁机器人的清洁路线可以分为随机覆盖清洁机器人和路径规划清洁机器人
其清扫路线图如图 1
擁啟 1 匚爭 Qi 唳总 AIEL3I3@LMm规划式清扫路线随机式清扫路址图 1 规划式清扫路线与随机式清扫路线图三、清洁机器人关键技术研究清洁机器人系统通常由 4 个部分组成:移动机构、感知系统、控制系统和吸尘系统;是一项集合传感检测、信息处理、运动控制、电源等多学科的研究成果
其关键技术包括多传感器信息融合技术、导航和定位技术及路径规划技术等
1、多传感器信息融合技术多传感器信息融合是指综合来自多个传感器的感知数据,以便产生更可靠、更准确或更全面的机器人状态信息,