两年前,爸爸给我买了套机器人组合套件,希望我在进入小学高年级之前掌握基本的机器人知识
去年暑假爸爸辅导我阅读《简易机器人制作》(江苏教育)一书,开始学习认识机器人,掌握初级的计算机控制和简单的机械知识
这个寒假我利用所掌握的知识,在爸爸指导下,开始实际制作一个简单的完整模型— — 智能机器人小车
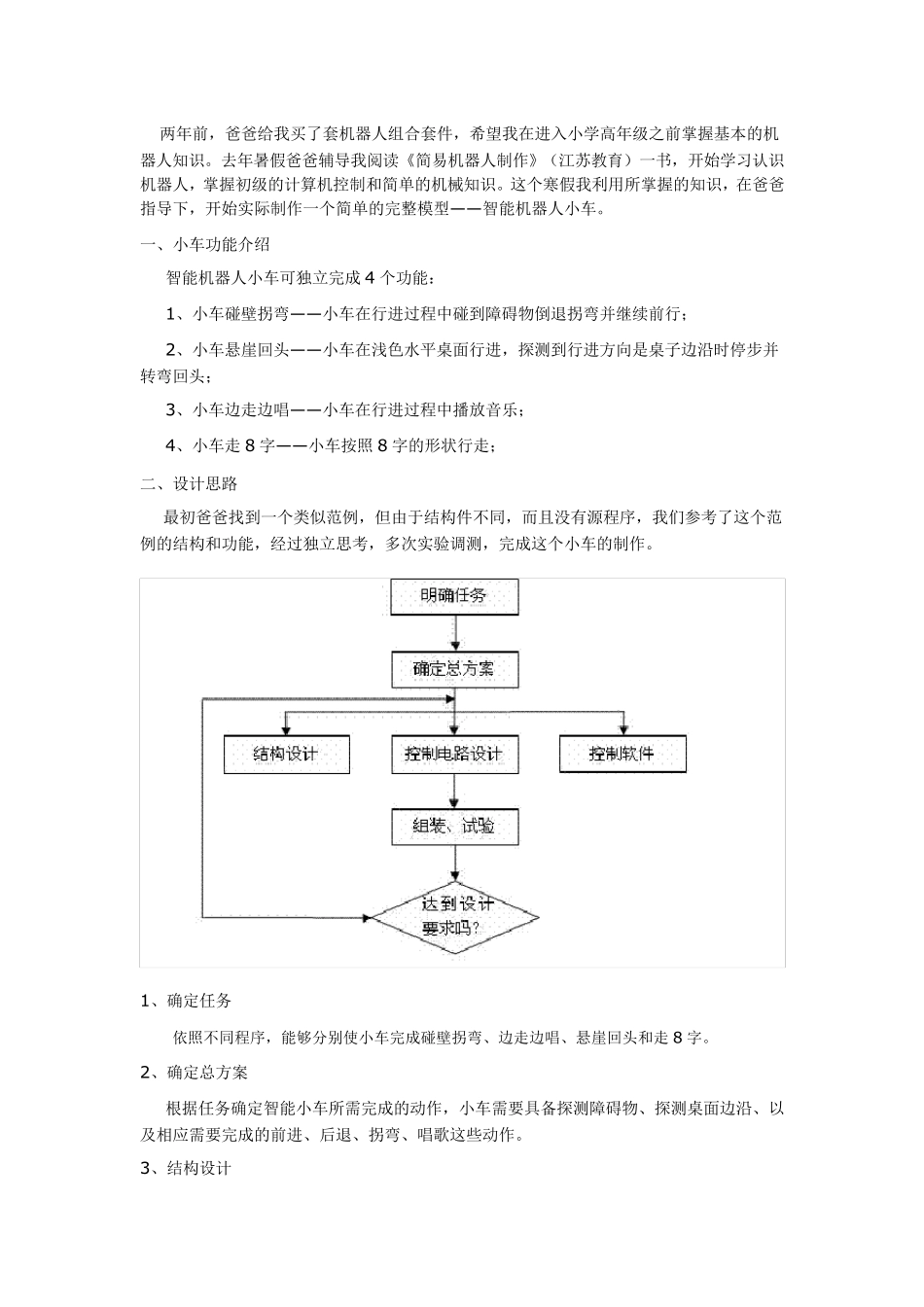
一、小车功能介绍 智能机器人小车可独立完成 4 个功能: 1、小车碰壁拐弯— — 小车在行进过程中碰到障碍物倒退拐弯并继续前行; 2、小车悬崖回头— — 小车在浅色水平桌面行进,探测到行进方向是桌子边沿时停步并转弯回头; 3、小车边走边唱— — 小车在行进过程中播放音乐; 4、小车走 8 字— — 小车按照 8 字的形状行走; 二、设计思路 最初爸爸找到一个类似范例,但由于结构件不同,而且没有源程序,我们参考了这个范例的结构和功能,经过独立思考,多次实验调测,完成这个小车的制作
1、确定任务 依照不同程序,能够分别使小车完成碰壁拐弯、边走边唱、悬崖回头和走 8 字
2、确定总方案 根据任务确定智能小车所需完成的动作,小车需要具备探测障碍物、探测桌面边沿、以及相应需要完成的前进、后退、拐弯、唱歌这些动作
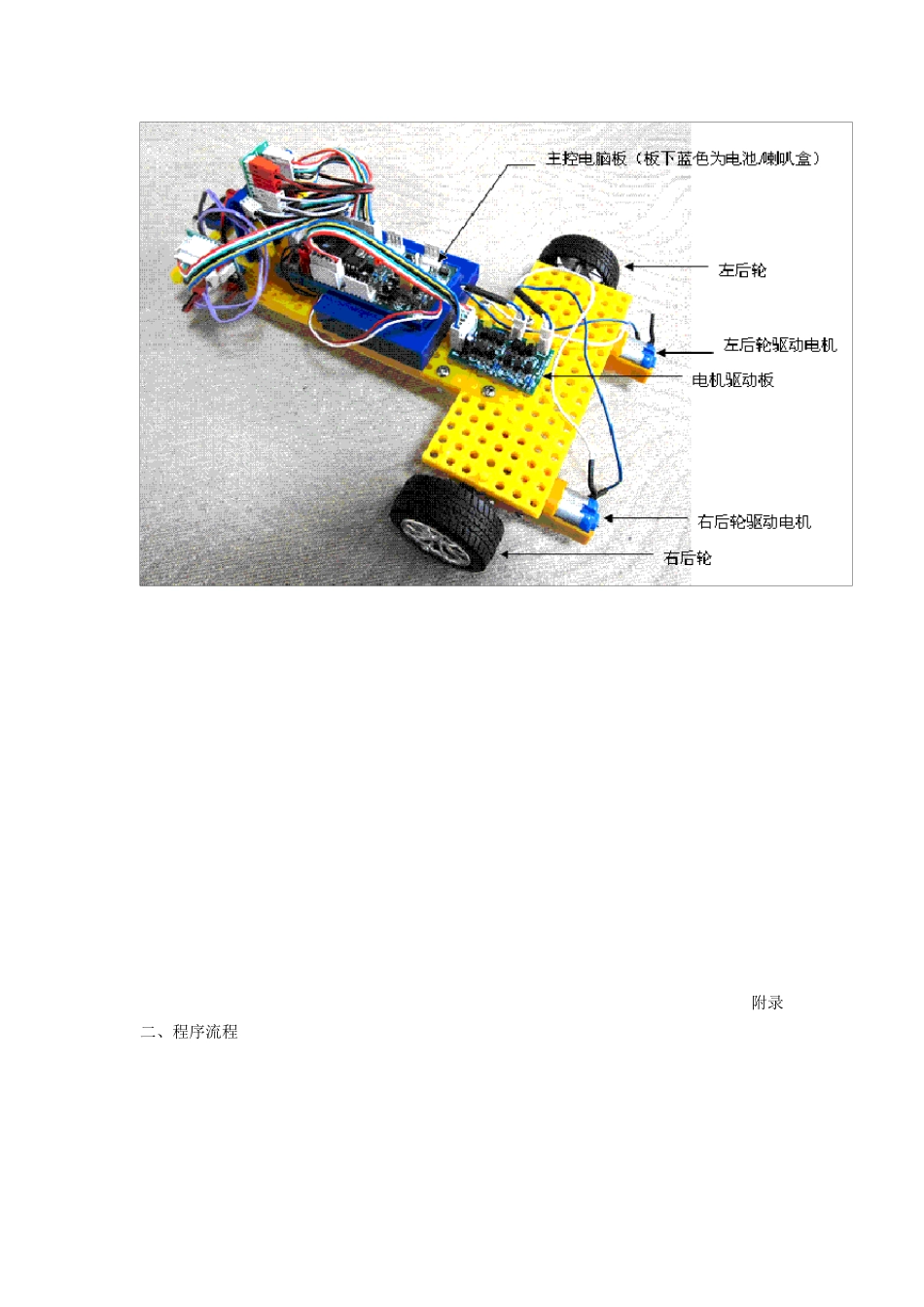
3、结构设计 结构设计成有两个电机分别控制两个后轮,前轮使用一个万向轮,另外需要一个接触传感器和一个双光反射传感器
结构上需要将接触传感器触点放在小车最前端,双光反射传感器设在接触传感器稍微靠后的位置,面向地面,距地面8-10mm
结构设计中的难点是万向轮很容易卡住,连接线不够长影响控制板安装位置
4、控制电路设计 控制电路要设计成让传感器(接触传感器、光反射传感器)判断有没有信号,然后确定两个电机正转或反转,实现小车前进、后退和拐弯这些动作
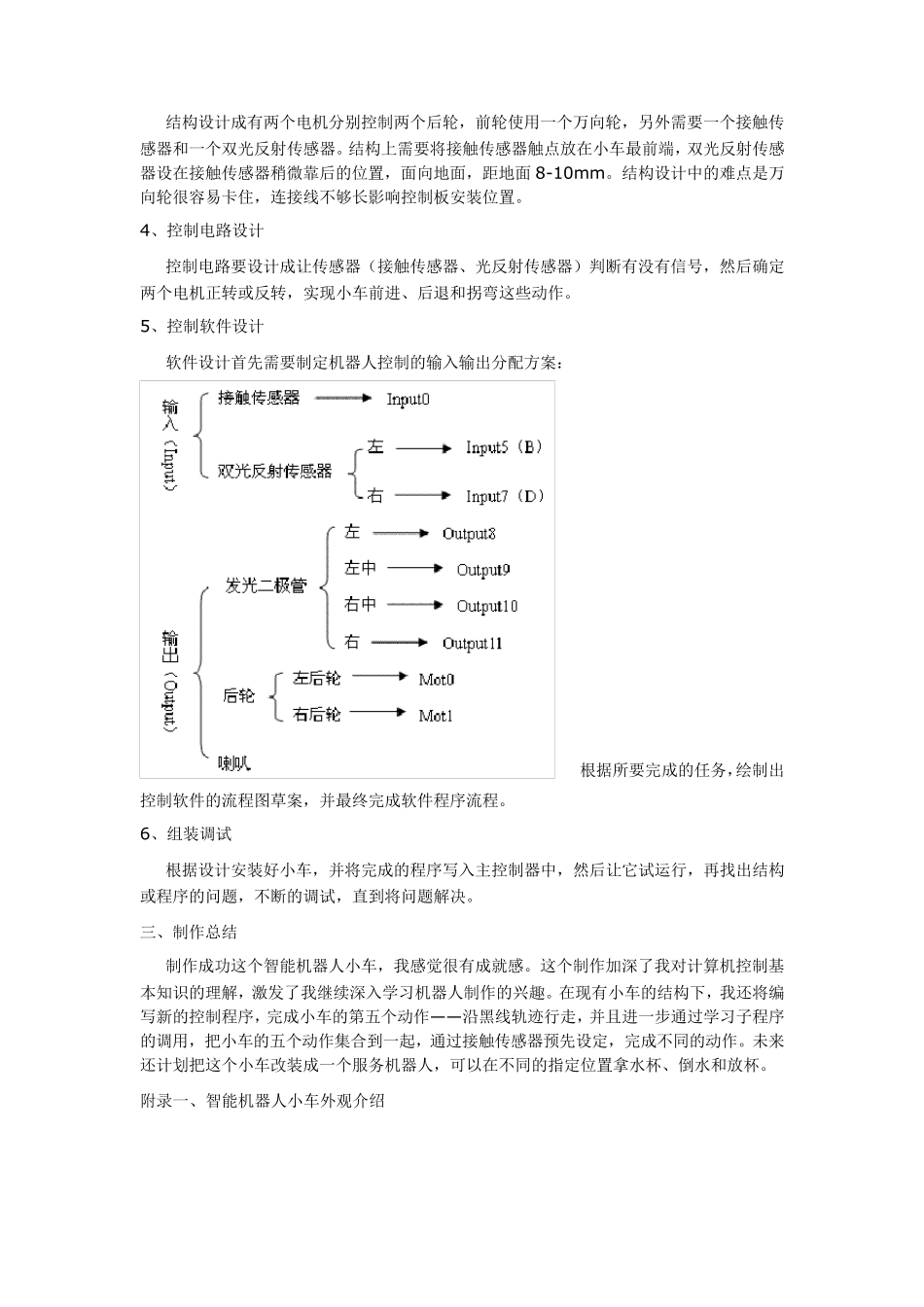
5、控制软件设计 软件设计首先需要制定机器人控制的输入输出分配方案: 根据所要完成的任务,绘制出控制软件的流程图草案,并最终完成软