机器人舵机说明 一、舵机简介 舵机,顾名思义,大海航行靠舵手,舵机早期是应用在航模中控制方向的,在航空模型中,飞行器的飞行姿态是通过调整发动机和各个控制多面来实现的,后来有人发现这种机器的体积小、重量轻、扭矩大、精度高,由于具备了这样的优点,很适合应用在机器人身上作为机器人的驱动
二、舵机的分类 按照舵机的转动角度分有 180度舵机和 360度舵机
180度舵机只能在 0度到 180度之间运动,超过这个范围,舵机就会出现超量程的故障,轻则齿轮打坏,重则烧坏舵机电路或者舵机里面的电机
360度舵机转动的方式和普通的电机类似,可以连续的转动,不过我们可以控制它转动的方向和速度
按照舵机的信号处理分为模拟舵机和数字舵机,它们的区别在于,模拟舵机需要给它不停的发送 PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次 PWM信号就能保持在规定的某个位置
关于PWM信号在 3
4节将会介绍
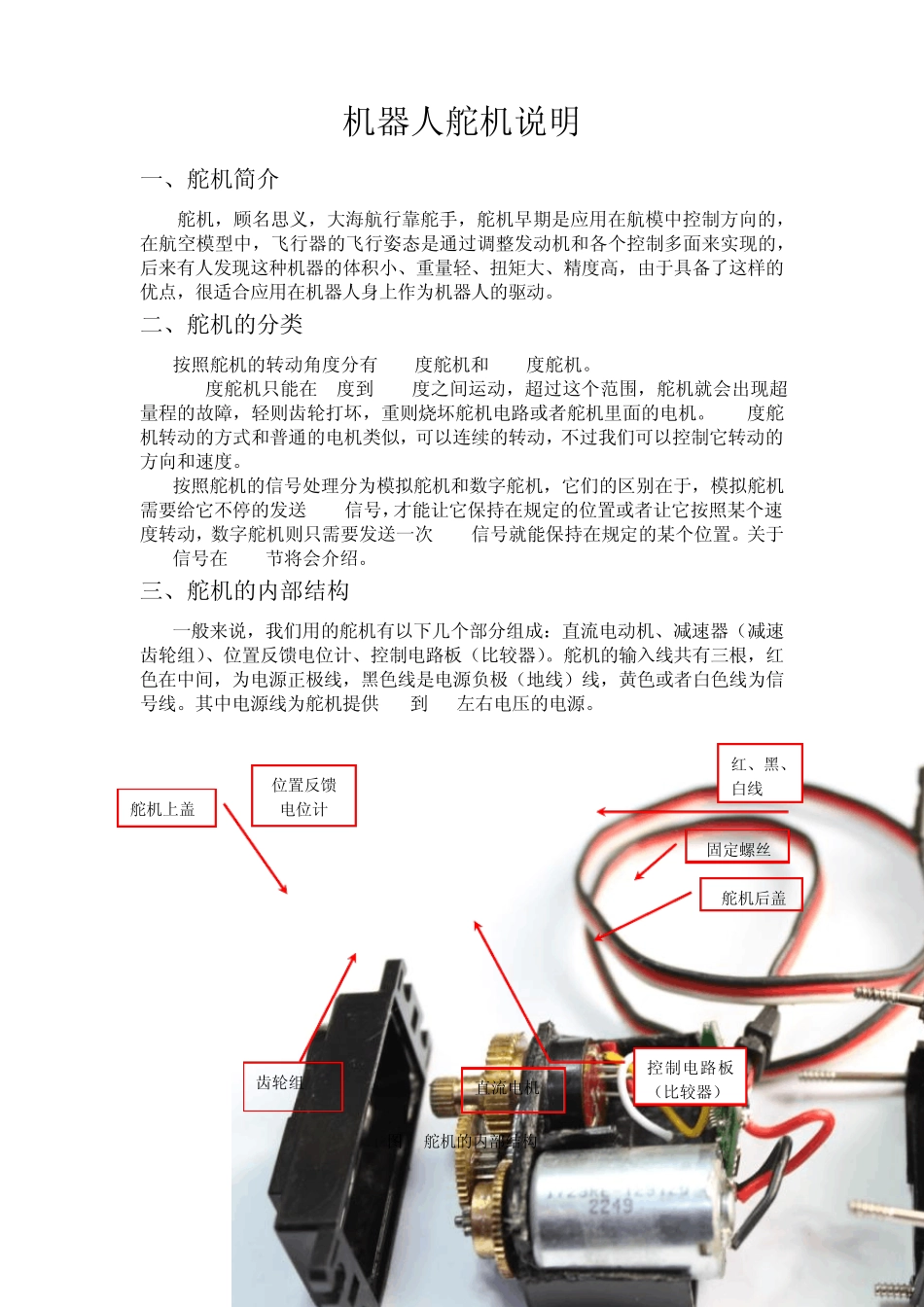
三、舵机的内部结构 一般来说,我们用的舵机有以下几个部分组成:直流电动机、减速器(减速齿轮组)、位置反馈电位计、控制电路板(比较器)
舵机的输入线共有三根,红色在中间,为电源正极线,黑色线是电源负极(地线)线,黄色或者白色线为信号线
其中电源线为舵机提供 6V到 7V左右电压的电源
图 1 舵机的内部结构 红、黑、白线 舵机上盖 齿轮组 直流电机 固定螺丝 舵机后盖 位置反馈电位计 控制电路板(比较器) 四、舵机的工作原理及控制方法 4
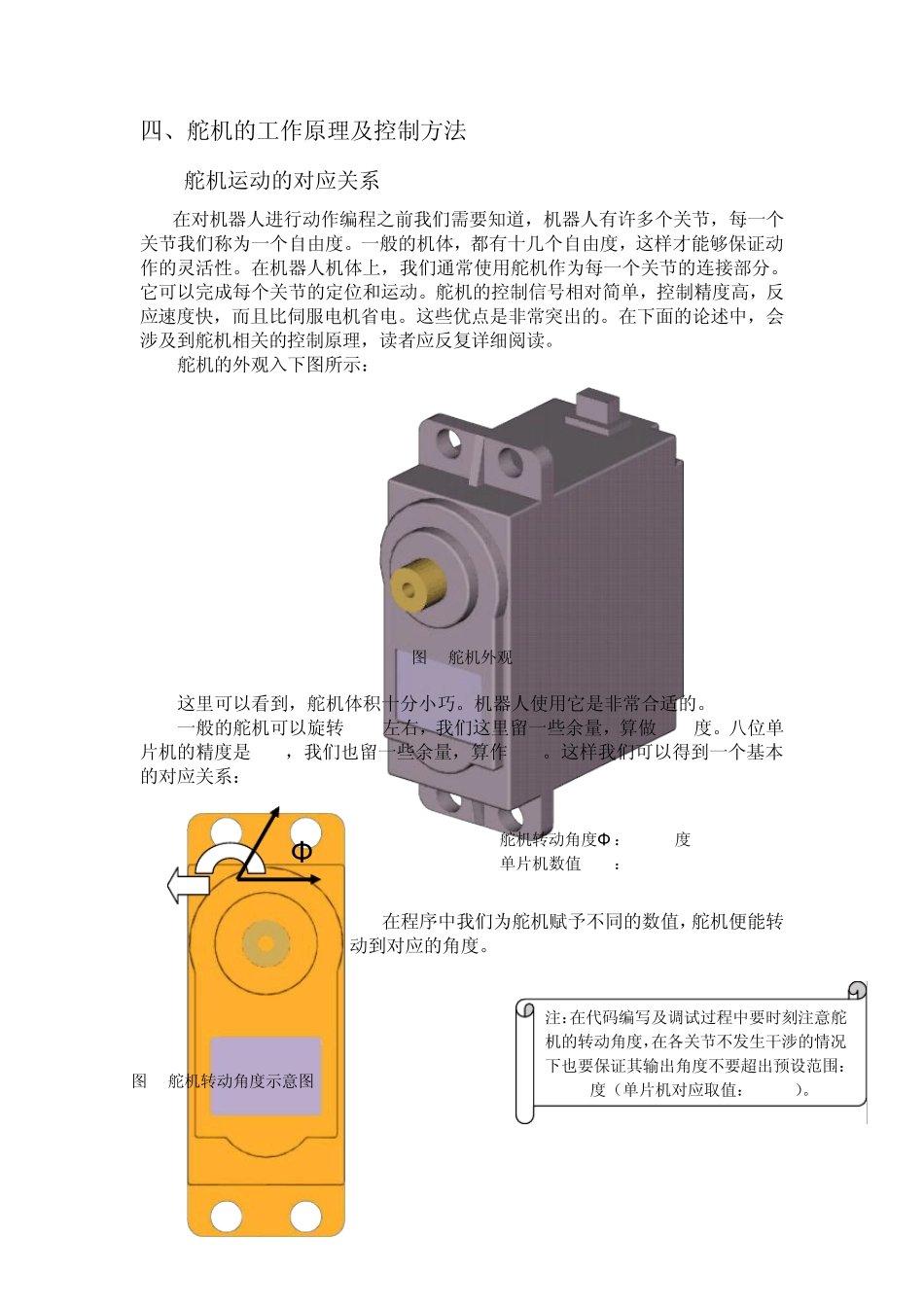
1 舵机运动的对应关系 在对机器人进行动作编程之前我们需要知道,机器人有许多个关节,每一个关节我们称为一个自由度
一般的机体,都有十几个自由度,这样才能够保证动作的灵活性
在机器人机体上,我们通常使用舵机作为每一个关节的连接部分
它可以完成每个关节的定位和运动
舵机的控制信号相对简单,控制精度高,反应速度快,而且比伺服电