1 目录 第一章 、5V5 仿真组(Middle Simu rosot)介绍 Fira Simu rosot Game 1
1 仿真型机器人足球介绍 1
2 仿真系统基本结构 1
3 仿真平台及系统特点 1
4 运行环境和开发工具 1
5 仿真平台的使用介绍 第二章、仿真平台与策略关系及其运动策略开发指南 2
1 什么是策略程序 2
2 仿真平台与策略的运行关系 2
3 仿真平台场地数据 2
4 接口代码解析 2
5 程序开发流程 2
6 动作函数介绍 2
7 在策略中调用动作的基本方法 2
8 简单策略开发 2
9 各种定位球 第三章、比赛规则 3
1 名词解释 3
2 比赛规则 3
3 犯规与处罚 3
4 裁判 3
5 环境 3
6 其他 2 第一章 5V5 仿真组(Middle Leagu e Simu rosot)介绍FIRA Simu roSot Game 1
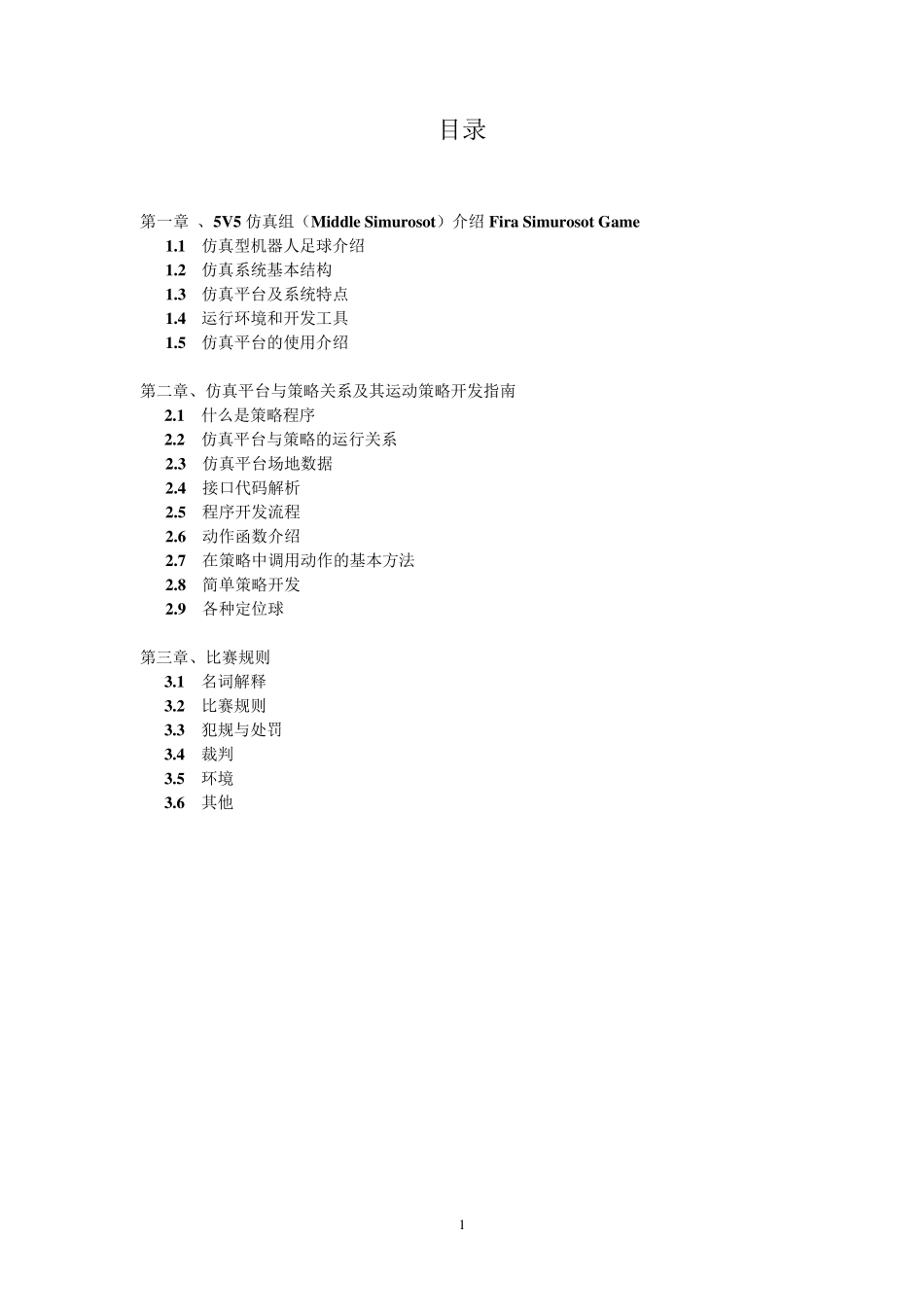
1 仿真型机器人足球介绍 仿真型机器人足球(Simu roSot) Simu roSot 是一种仿真的软件系统,在该项比赛中,参赛的每个机器人不是 实际的机器人,而是用计算机模拟的虚拟机器人,它主要研究比赛策略,以软件为主,忽略机器人的硬件相关的需求
比赛中,我们仅关注的好似软件部分,主要研究用软件来实现既定的策略,完成给定的程序逻辑,主体的程序对语言要求很低,主要是要求拥有清晰的逻辑和编程思想
换言之,Simu roSot 类型的比赛是智力与智力的碰撞
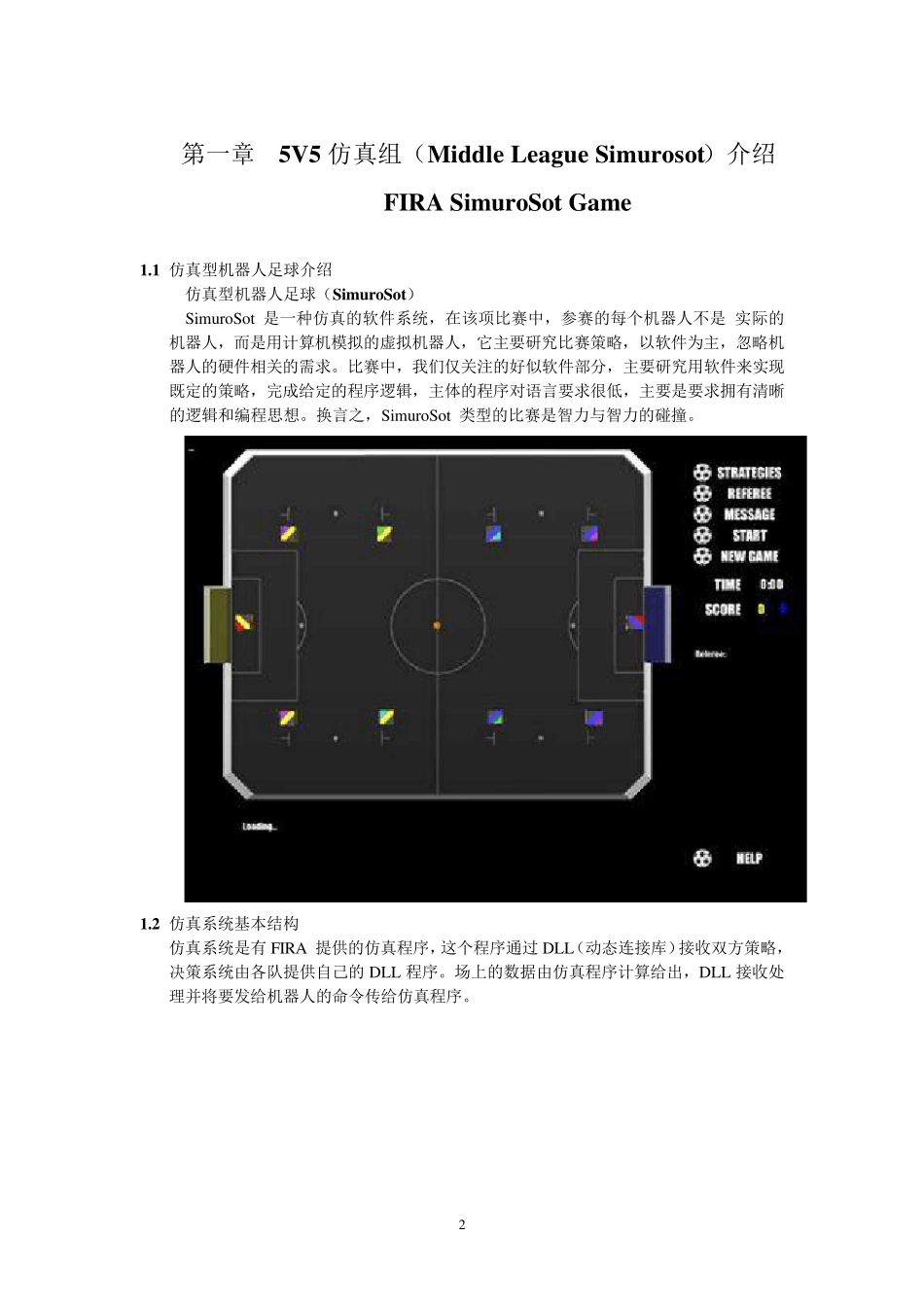
2 仿真系统基本结构 仿真系统是有 FIRA 提供的仿真程序,这个程序通过 DLL(动态连接库)接收双方策略,决策系统由各队提供自己的DLL 程序
场上的数据由仿真程序计算给出,DLL 接收处理并将要发给机器人的命令传给仿真程序
3 仿真平台及系统特点 开发者:澳大利亚的Dr
Ju n Jo 领导的Griffith 大学信息技术学院RSS