第七章 机构创新设计 第一节 同轨迹连杆机构 第二节 新型内燃机的开发 第三节 联轴器的创新设计 第四节 抓斗的原理方案创新设计 第五节 过载保护装置的机械结构设计 实例 第一节 同轨迹连杆机构 同轨迹四连杆机构是指自由度 f相同、输入构件的运动规律相同、输出构件上的一点轨迹相同的一组连杆机构,但这组连杆机构的运动学尺寸不同,所以其受力状态、动态性能有巨大差异
因而,同轨迹连杆机构的形成方法是机构创新设计的重要方法之一
形成同轨迹连杆机构的罗伯特-契贝谢夫定理是由美国数学家萨姆尔·罗伯特于 1875年和俄国学者契贝谢夫于 1878年分别发现的,因此称为“罗伯特-契贝谢夫定理”
该定理的内容是:由一个四杆铰链机构发生的一条连杆曲线,还可以由另外两个四杆铰链机构发生出来
或表述为同一连杆曲线,可以用三个不同的机构来实现
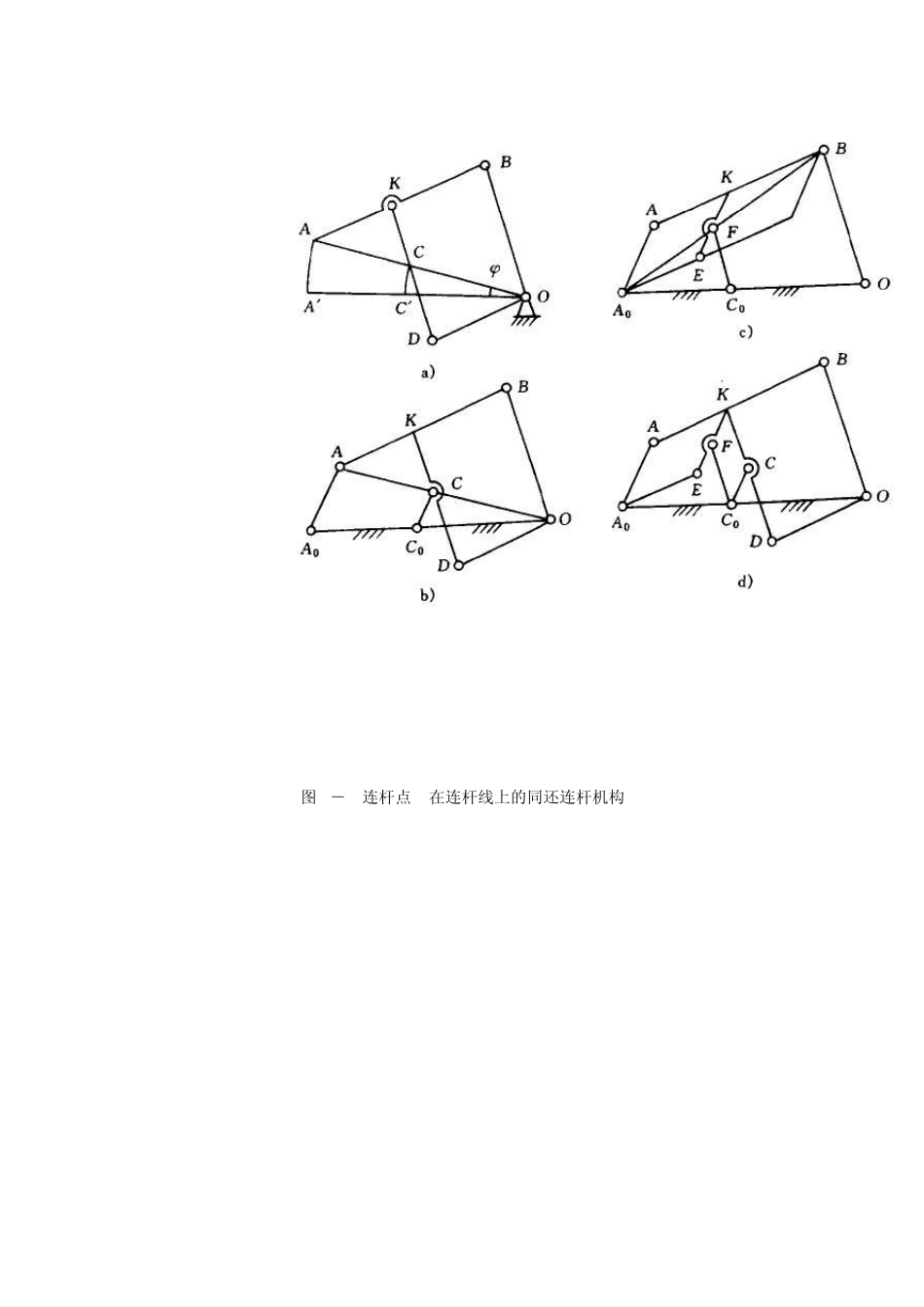
连杆点k位于连杆两铰链连线上的同迹连杆机构 图形缩放原理如下图7-1a所示为一平行四边形机构,由平行四边形obkd与机架在o 点铰接而成
a 点为bk杆延长线上的一点
连接ao得交点c
当a 点沿任意给定轨迹运动时,c点将给出与a 点相似但缩小了的轨迹
⑴ao 除以co与ab除以kb的值是相等的为常数 m(射线定理)
⑵当此四边形作为一刚体绕 o 转动一角度时,a 点转到 a',按射线定理有 aa'与cc'的比值与ao 与co的比例等于常数 m
a 点的一切运动都是这两部分运动的合成
因此 c点的运动是以缩小的比例模拟 a点的运动,反之亦然
图7-1 连杆点k在连杆线上的同还连杆机构 第一个同迹连杆机构设计如图7-1b所示,在原始机构上作平行四边形导引机构bodk
曲柄 c0cdo为所示的第一个同迹连杆机构,k为连杆cd延长线上的点
所示曲柄拉摇杆机构的尺寸,如图中下面的公式
第二个同迹连杆机构设计如图7-1c所示,在原