模态分析漫谈之八 实模态和复模态有什么区别 实模态和复模态有什么区别
这是一个经常使人困惑的问题
要解释清楚这个问题,需要一点数学和理论
让我们从无阻尼系统谈起,然后看看比例阻尼和非比例阻尼系统,问题就很清楚了
我们用一个简单的例子来说明问题
一般,一个系统的运动方程可以写作 1 其中 M,C,K分别代表质量,阻尼和刚度矩阵
紧随其后的分别是加速度,速度,位移和力
在模态空间里,上式转变为 2 其中的对角阵分别是模态质量,模态阻尼和模态刚度(模态阻尼只在特定情况下是对角阵)
通过上式,各阶模态解耦
为了更好地理解,我们看一个简单的例子
系统矩阵为 3 4 首先看无阻尼的情况,求解特征值问题,可以得到系统的频率,留数和振型如下: 5 请注意振型是由一组实数组成
我们再来看比例阻尼的情况,阻尼矩阵是Cp,同样求解特征值问题,可以得到系统的频率,留数和振型如下: 6 可以看到,比例阻尼系统的振形和无阻尼系统振型是完全一样的
现在,来看看一般阻尼的情形
求解结果如下 7 很明显,振型是由一组复数组成,此时的模态我们称为复模态,而前面的两种情形我们称为实模态
简单总结一下两者的区别: 实模态: 1 振型可以用一个驻波描述; 2 所有点同时通过它们的最大点或者最小点; 3 所有点同时过零点; 4 振型由一组实数描述; 5 无阻尼和比例阻尼系统的振型相同,关于质量,阻尼和刚度矩阵解耦
复模态 1 振型可以用一个行波描述; 2 所有点不同时通过它们的最大点或者最小点; 3 所有点不同时过零点; 4 振型由一组复数描述; 5 振型不能对阻尼矩阵解耦
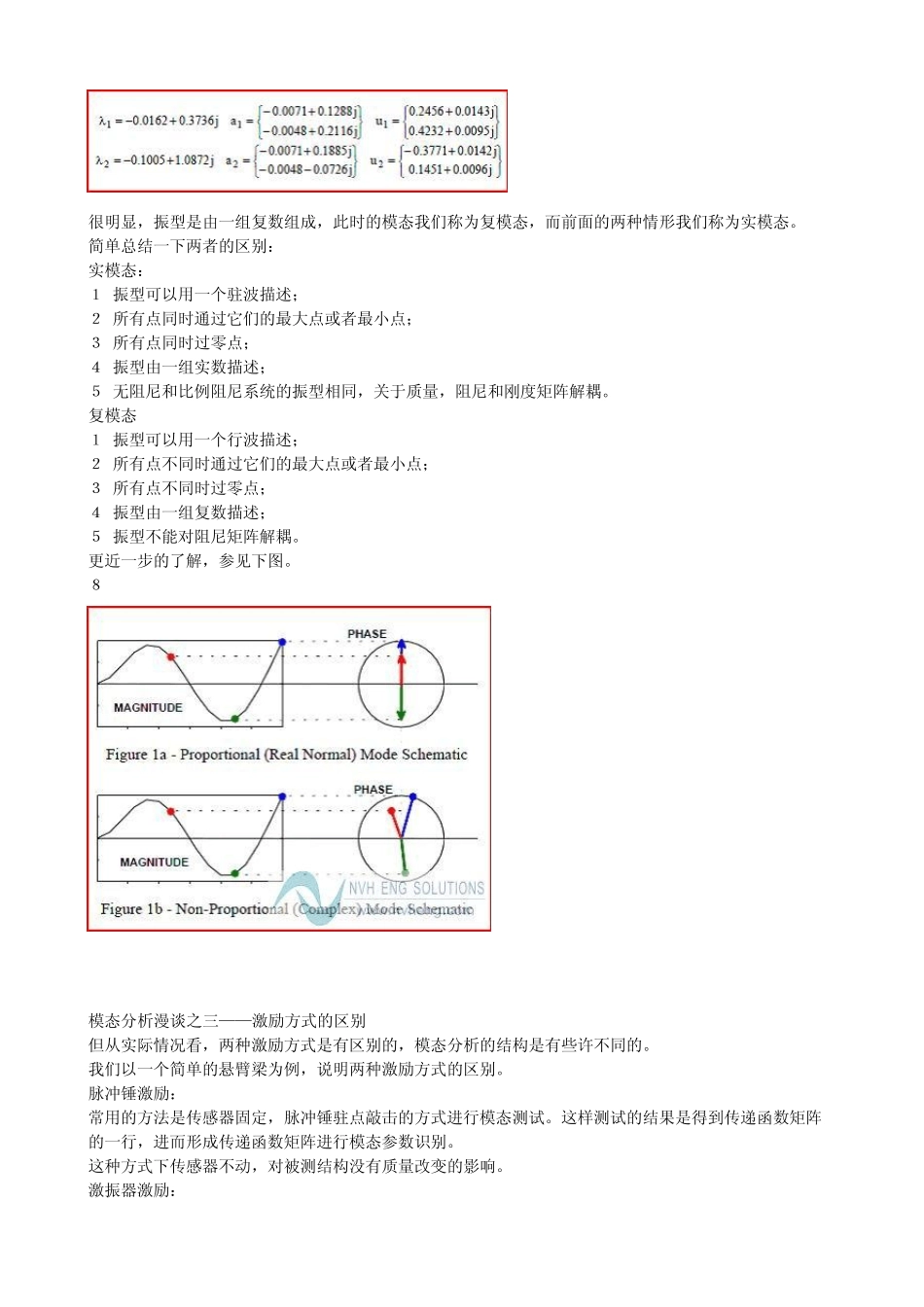
更近一步的了解,参见下图
8 模态分析漫谈之三——激励方式的区别 但从实际情况看,两种激励方式是有区别的,模态分析的结构是有些许不同的
我们以一个简单的悬臂梁为例,说明两种激励方式的区别
脉冲锤激励: 常用的方法是传感器固定