步进电机控制实验 一、 实验目的 1、了解步进电机控制的基本原理
2、掌握步进电机转动的编程方法
二、 实验内容 通过程序改变正、反转命令,转速参数和转动步数,并在显示器上显示,转动步数减为零时停止转动
三、 实验预备知识 步进电机驱动原理是切换每相线圈中的电流和顺序,来使电机作步进式旋转
驱动电路由脉冲信号来控制,所以调节脉冲信号的频率便可改变步进电机的转速
单片机控制步进电机最适合
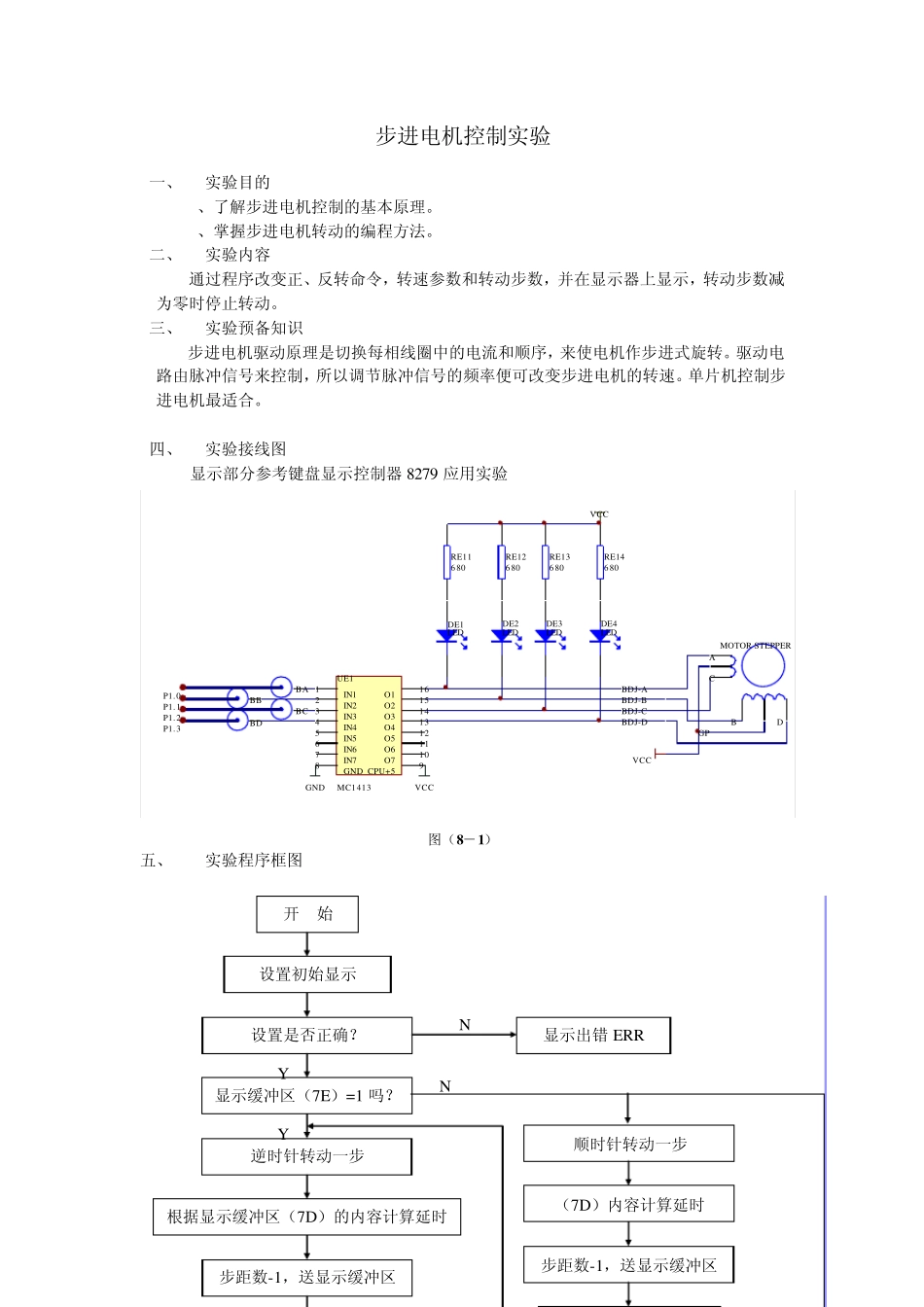
四、 实验接线图 显示部分参考键盘显示控制器 8279 应用实验 V CCV CCIN11IN22IN33IN44IN55IN66IN77GND8CPU+59O710O611O512O413O314O215O116UE1MC1413GNDBDJ-ABDJ-BBDJ-CBDJ-DBABBBDBCRE11680RE12680RE13680RE14680DE1LEDDE2LEDDE3LEDDE4LEDMOTOR STEPPERV CCABCDGPP1
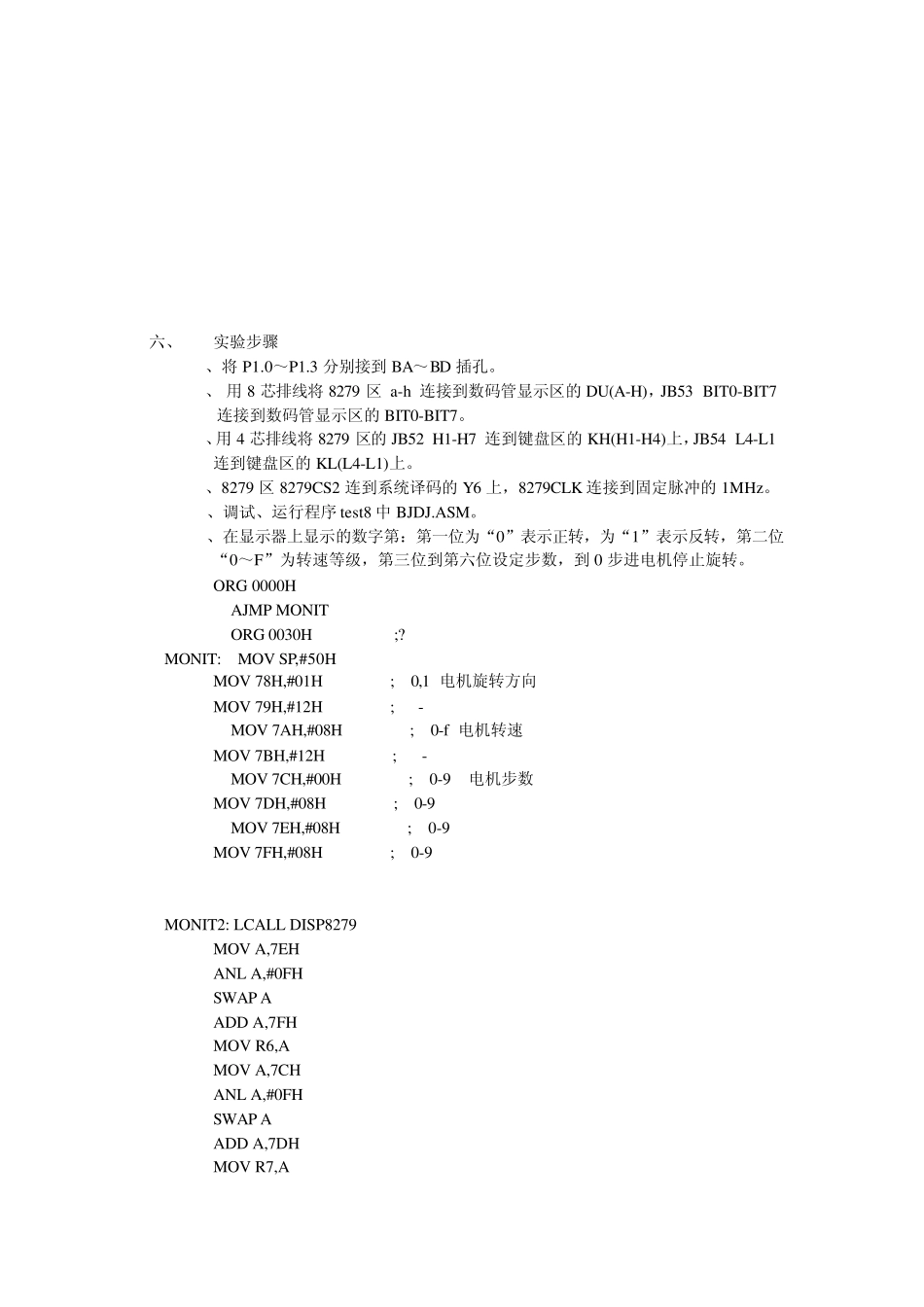
3 图(8 -1 ) 五、 实验程序框图 开 始 设置初始显示 设置是否正确
显示缓冲区(7E)=1 吗
逆时针转动一步 根据显示缓冲区(7D)的内容计算延时 步距数-1,送显示缓冲区 Y N N Y 显示出错 ERR 顺时针转动一步 (7D)内容计算延时 步距数-1,送显示缓冲区 六、 实验步骤 1、将P1
3 分别接到BA~BD 插孔
2、 用8 芯排线将8279 区(a-h)连接到数码管显示区的DU(A-H),JB53(BIT0-BIT7)连接到数码管显示区的BIT0-BIT7
3、用4 芯排线将8279 区的JB52(H1-H7)连到键盘区的KH(H1-H4)上,JB54(L4-L1)连到键盘区的KL(L4-L1)上
4、8279 区8279CS2 连到系统译码的Y6 上,8279CLK 连