计算机原理与接口技术 课程设计报告 题目:步进电机转速实时控制课程设计 学生姓名: 专 业: 班 级: 学 号: 指导教师: 起止时间: 电子信息工程学院 目录 一. 方案设计 二. 硬件系统的基本原理 (一)步进电机 35BYJ46 (二)8255A可编程并行接口芯片 (三)74LS138 译码芯片简介 三. 软件框图及设计思想 四. 软件清单及程序流程图 五. 心得体会 六. 主要参考资料 附:proteu s 仿真原理图 一. 方案设计 本设计采用电压为DC12V的四相八拍步进电机35BYJ46型电机,用ULN2003作为步进电动机驱动电路主芯片,以8255A作为8086并行输出接口,8086对步进电机的控制信号则通过8255A送到ULN2003
关于转向与转速,通过查表的方式实现,以逐次递增方向查表,依次输出表中数据,则步进电机正转;以逐次递减方向查表,则步进电机反转,即通过一个表实现步进电机的正转与反转
转速则通过调用延时子程序,当调用延时较长的子程序时,则步进电机转速慢,当调用延时较短的子程序时,步进电机转速加快
二. 硬件系统的基本原理 (一) 步进电机35BYJ46 1
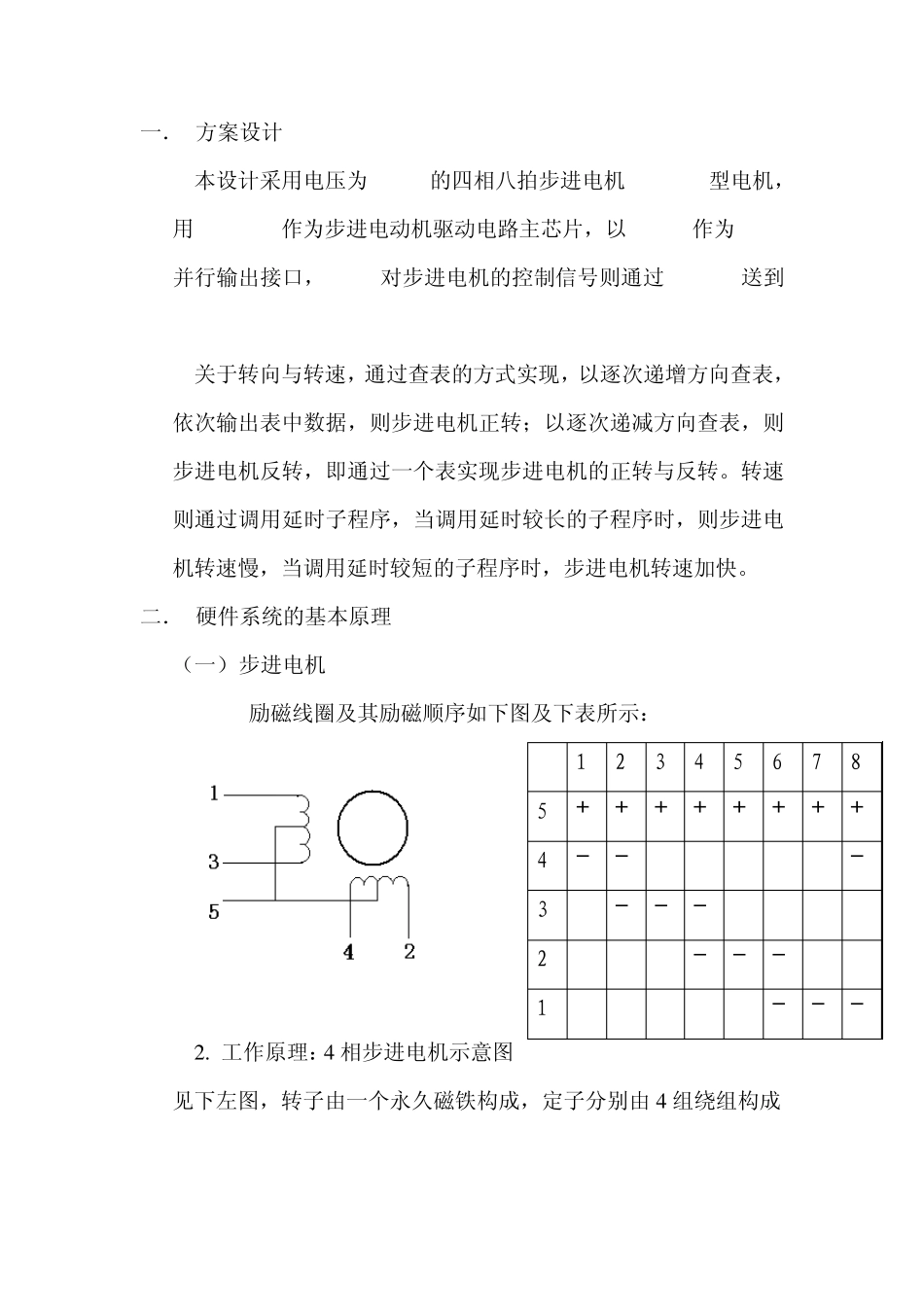
励磁线圈及其励磁顺序如下图及下表所示: 2
工作原理:4 相步进电机示意图见下左图,转子由一个永久磁铁构成,定子分别由 4 组绕组构成 1 2 3 4 5 6 7 8 5 + + + + + + + + 4 - - - 3 - - - 2 - - - 1 - - - 当S1 连通电源后,定子磁场将产生一个靠近转子为N 极,远离转子为S极才磁场,这样的定子磁场和转子的固有磁场发生作用,转子就会转动,正确地S1、S4 的送电次序,就能控制转子旋转的方向
例如:若送电的顺序为S1 闭合断开S2闭合断开S3闭合断开S4闭合断开,周而复始的循环,在定子和转子共同作用下,电机就瞬时针旋转: