中国电力出版社 - 149 - 第5 章 永磁同步电动机系统及其SPW M 控制 除一些利用异步转矩或磁阻转矩起动的永磁同步电动机之外,绝大多数的永磁同步电动机(Permanent Magnet Sy nchronou s Motor, PMSM)需要逆变器驱动以平稳起动及稳定运行
因此一般意义上的永磁同步电动机系统是指具有位置传感的、SPWM 逆变器驱动的永磁同步电动机,或称为正弦波驱动的无刷直流电动机,很多的文献也直接将之简称为永磁同步电动机
本章主要阐述永磁同步电动机即正弦波无刷直流电动机的原理及其SPWM控制
1 永磁同步电动机系统的构成及设计特点 5
1 永磁同步电动机系统的构成 与前一章的方波无刷直流电动机相比较,虽然两者都是自同步运行的永磁同步电动机,均由永磁同步电动机、转子位置传感器和控制驱动电路三部分组成,但在运行原理上存在较大的差异
方波无刷直流电动机中,只需要若干个磁极位置处的开关信号就可以形成换相逻辑,从而产生在空间跳跃旋转的定子磁动势;通过平顶波反电动势的设计及矩形电流波形的控制,可以产生近似恒定的电磁转矩,转矩平稳性较差
而在永磁同步电动机中,为产生恒定的电磁转矩,一般采用SPWM 信号驱动功率电路,在电动机三相绕组中产生正弦波的电流,从而形成连续旋转的定子圆形旋转磁场,因此需要检测连续的转子位置信息
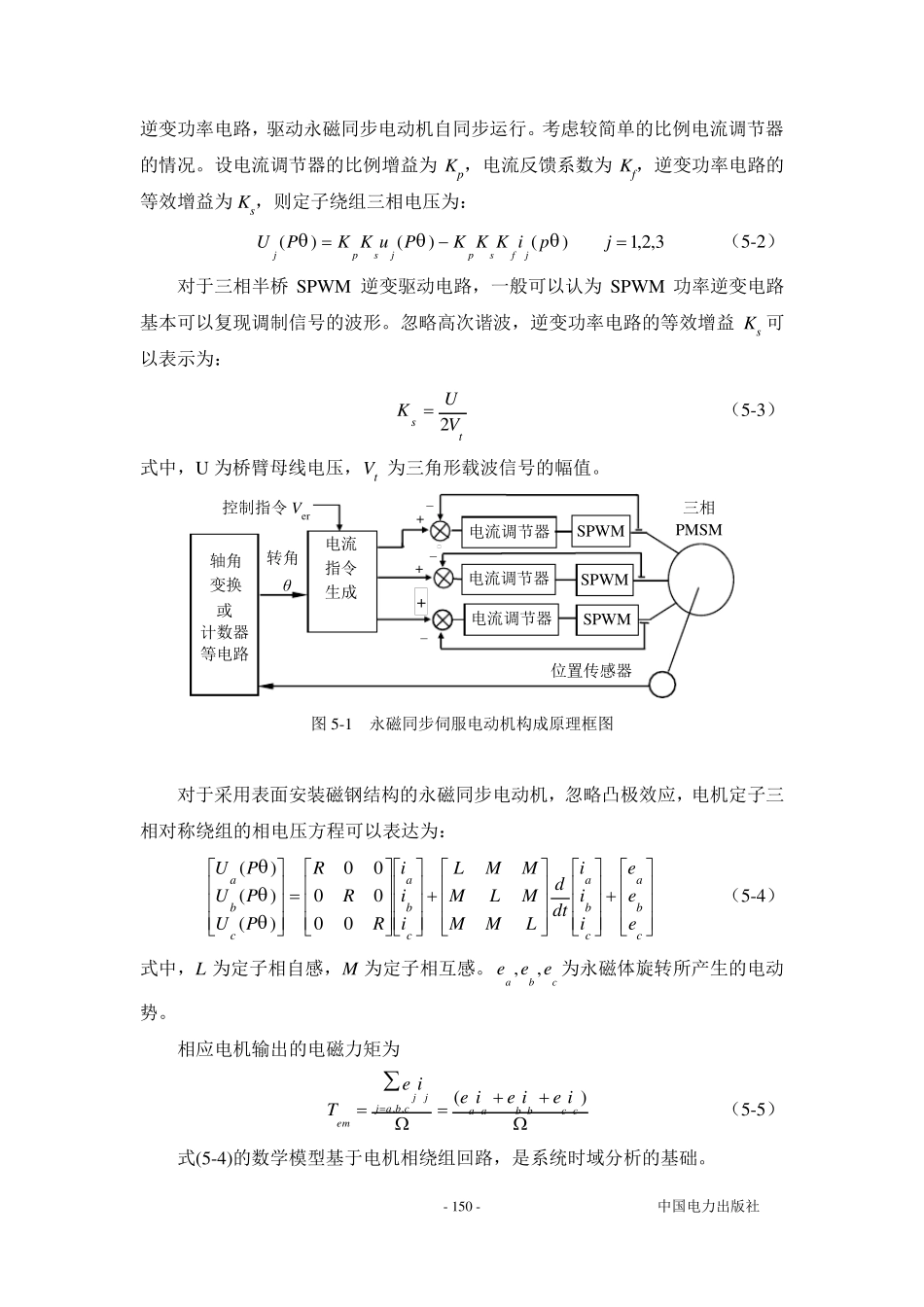
图 5-1 所示框图为永磁同步伺服电动机的基本结构之一
转子位置传感器为旋转变压器或编码器等,通过轴角变换电路或计数器等可以将连续位置传感器的输出信号变换为转角位置信号 pθ
之后,在相电流指令合成电路中产生各相的电流指令信号ju ,如式(5-1)所示
)32)1((sin)(jpVPuerj 3,2,1j (5-1) 式中,Ver 输入控制指令,为速度误差信号或转矩指令信号
相电流指令与电流负反馈信号经电流调节