1 引言 长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择
特别随着计算机在控制领域,高开关频率、全控型第二代电力半导体器件(GTR、GTO、MOSFET、IGBT 等)的发展,以及脉宽调制(PWM)直流调速技术的应用,直流电机得到广泛应用
为适应小型直流电机的使用需求,各半导体厂商推出了直流电机控制专用集成电路,构成基于微处理器控制的直流电机伺服系统
但是,专用集成电路构成的直流电机驱动器的输出功率有限,不适合大功率直流电机驱动需求
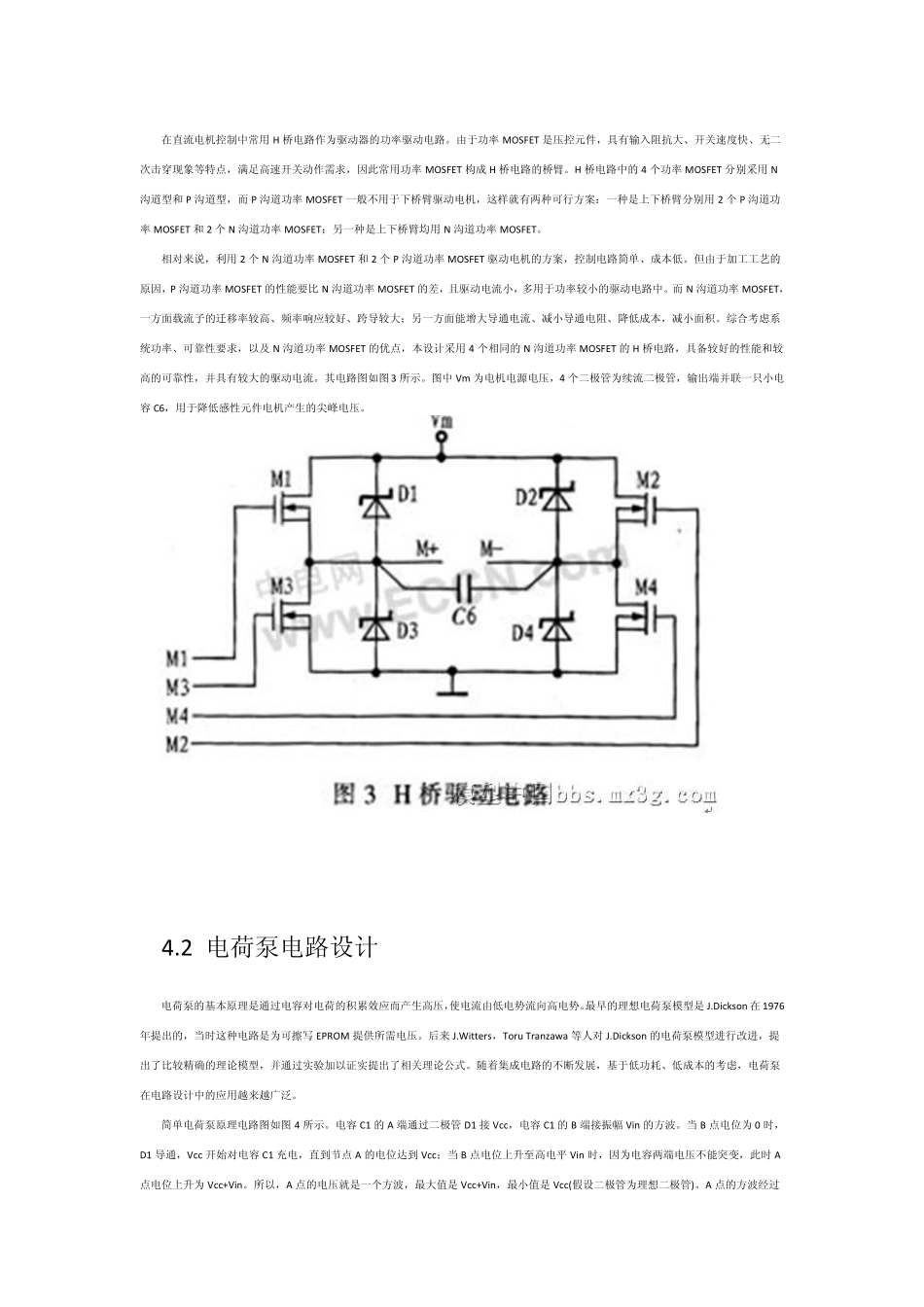
因此采用 N 沟道增强型场效应管构建 H 桥,实现大功率直流电机驱动控制
该驱动电路能够满足各种类型直流电机需求,并具有快速、精确、高效、低功耗等特点,可直接与微处理器接口,可应用 PWM 技术实现直流电机调速控制
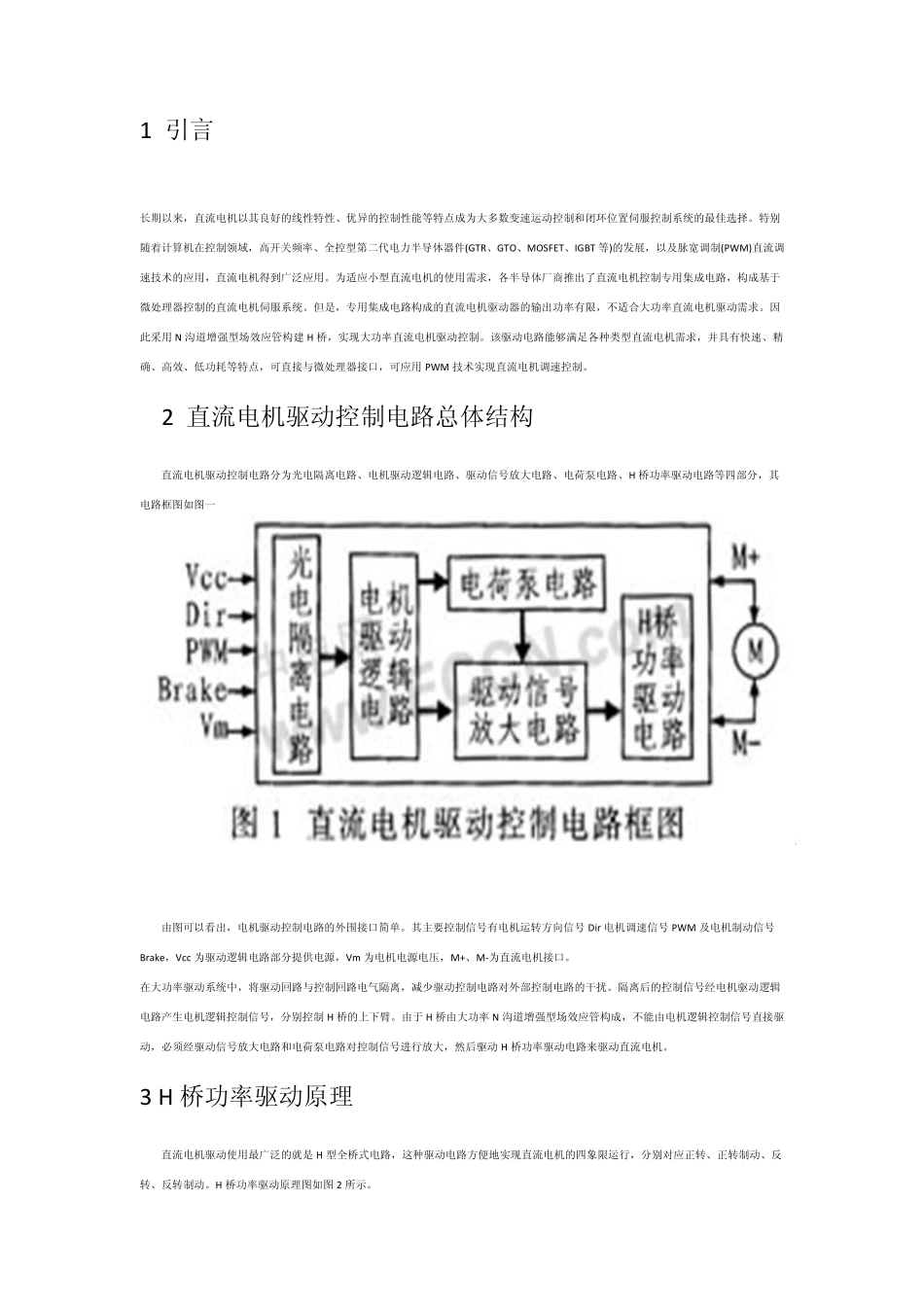
2 直流电机驱动控制电路总体结构 直流电机驱动控制电路分为光电隔离电路、电机驱动逻辑电路、驱动信号放大电路、电荷泵电路、H 桥功率驱动电路等四部分,其电路框图如图一 由图可以看出,电机驱动控制电路的外围接口简单
其主要控制信号有电机运转方向信号 Dir电机调速信号 PWM 及电机制动信号Brake,Vcc 为驱动逻辑电路部分提供电源,Vm 为电机电源电压,M+、M-为直流电机接口
在大功率驱动系统中,将驱动回路与控制回路电气隔离,减少驱动控制电路对外部控制电路的干扰
隔离后的控制信号经电机驱动逻辑电路产生电机逻辑控制信号,分别控制 H 桥的上下臂
由于 H 桥由大功率 N 沟道增强型场效应管构成,不能由电机逻辑控制信号直接驱动,必须经驱动信号放大电路和电荷泵电路对控制信号进行放大,然后驱动 H 桥功率驱动电路来驱动直流电机
3 H 桥功率驱动原理 直流电机驱动使用最广泛的就是 H 型全桥式电路,这种驱动电路方便地实现直流电机的四象限运行,分别对应正转、正转制动、